Автор: Денис Аветисян
Новое исследование показывает, что для эффективного управления автомобилем не обязательно обрабатывать всю визуальную информацию, а достаточно фокусироваться на ключевых элементах.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал![В предложенном методе достигается повышение эффективности и обобщающей способности за счёт введения стратегий отбора патчей (стохастического и матричного) и последующего реструктурирования дескрипторов путём маскировки или удаления невыбранных, что позволяет снизить время вычислений в 2.4 раза при сохранении пространственной семантики, при этом маскировка осуществляется посредством модификации матрицы внимания с использованием параметра [latex]r[/latex] и функции [latex]f[/latex], определяющей вес патча в зависимости от расстояния между его элементами.](https://arxiv.org/html/2601.10707v1/Results/Algorithm_Update_Horizontal_Enhanced.png)
Предложена методика стохастического отбора фрагментов изображения (Stochastic Patch Selection) для повышения эффективности и обобщающей способности систем автономного вождения.
Несмотря на успехи в обучении систем автономного вождения, их обобщающая способность часто страдает от избыточности извлекаемых признаков. В работе «See Less, Drive Better: Generalizable End-to-End Autonomous Driving via Foundation Models Stochastic Patch Selection» предложен метод, основанный на случайном исключении части признаков, извлеченных из предварительно обученных моделей, что позволяет повысить надежность и эффективность систем автономного управления. Показано, что выборочное маскирование избыточных признаков не только улучшает обобщающую способность, но и позволяет добиться значительного прироста производительности в различных сценариях, включая реальные дорожные условия. Возможно ли дальнейшее снижение вычислительных затрат и повышение устойчивости систем автономного вождения за счет более интеллектуального отбора и организации признаков?
Математическая Элегантность Визуального Восприятия: Преодоление Узких Мест
Традиционные методы компьютерного зрения в значительной степени полагаются на извлечение признаков из локальных фрагментов изображения, или «патчей». Этот подход, несмотря на свою эффективность в решении ряда задач, характеризуется высокой вычислительной сложностью и избыточностью. Извлечение признаков из каждого патча требует значительных ресурсов, особенно при обработке изображений высокого разрешения или видеопотоков. Кроме того, значительная часть информации, содержащейся в этих патчах, часто дублируется, что приводит к увеличению объема данных, необходимых для хранения и обработки, и замедляет работу алгоритмов. Эффективное решение этой проблемы является ключевым шагом на пути к созданию более быстрых и масштабируемых систем компьютерного зрения.
Традиционный подход в компьютерном зрении, основанный на анализе изображений по фрагментам, часто приводит к формированию многомерных пространств признаков. Это обусловлено тем, что каждый фрагмент требует отдельного описания, что увеличивает объем данных и, соответственно, вычислительную нагрузку. Повышенная размерность не только замедляет обработку изображений, но и существенно ограничивает возможность реализации систем компьютерного зрения в реальном времени, особенно в приложениях, требующих мгновенной реакции, таких как автономные транспортные средства или робототехника. Эффективное снижение размерности, сохраняя при этом ключевую информацию, становится критически важной задачей для преодоления этого узкого места.
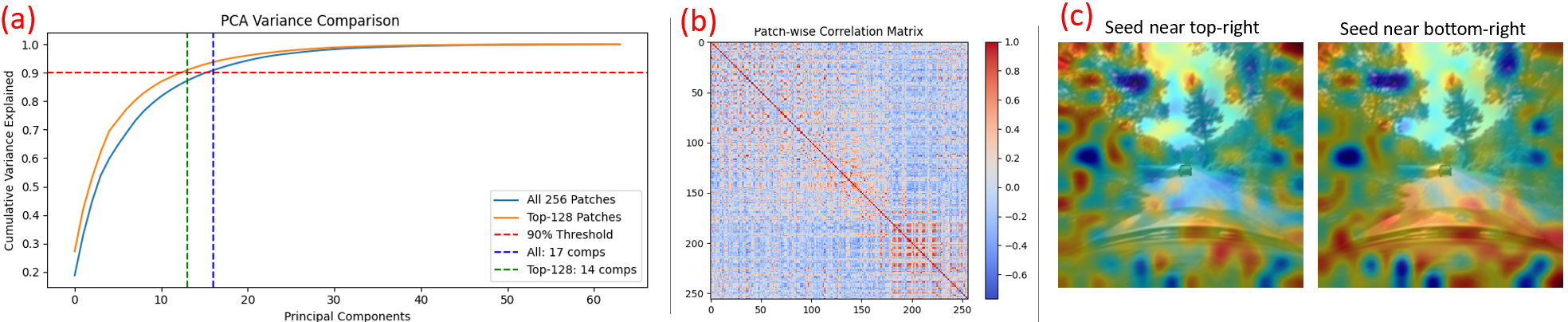
Анализ дескрипторов, полученных из локальных участков изображения, выявил значительное перекрытие информации. Исследования показали, что для достижения 90% совокупной объясненной дисперсии достаточно всего 17 из 64 главных компонент. Это свидетельствует о высокой степени избыточности в представлении признаков, что позволяет существенно снизить вычислительную нагрузку и объем памяти, необходимый для обработки изображений. Такой результат указывает на возможность разработки более эффективных алгоритмов компьютерного зрения, использующих компактные представления признаков без существенной потери информативности и точности распознавания.
Фундаментальные Модели: Новый Подход к Извлечению Признаков
Фундаментальные модели, такие как BLIP2 и DINO, предоставляют предварительно обученное, многомерное представление визуальной информации, устраняя необходимость в ручной разработке признаков. Традиционно, извлечение признаков из изображений требовало экспертных знаний и значительных усилий для определения и реализации оптимальных алгоритмов. Данные модели, обученные на масштабных наборах данных, автоматически извлекают релевантные признаки, формируя векторные представления изображений, пригодные для широкого спектра задач компьютерного зрения. Это позволяет разработчикам сосредоточиться на решении конкретных задач, а не на предварительной обработке данных, значительно упрощая и ускоряя процесс разработки.
Основанные на глубоком обучении модели, такие как BLIP2 и DINO, позволяют значительно снизить вычислительную нагрузку за счет представления визуальной информации в более компактном и эффективном векторном пространстве. Традиционные методы извлечения признаков часто требовали обработки большого количества параметров и значительных вычислительных ресурсов. В отличие от них, foundation models используют предварительно обученные представления, что позволяет достичь сопоставимой или даже более высокой производительности при значительно меньшем объеме необходимых вычислений и снижении требований к памяти. Это достигается за счет использования архитектур, оптимизированных для эффективного кодирования визуальной информации, и методов сжатия данных, которые минимизируют размер векторного представления без потери существенной информации.
Использование трансферного обучения позволяет моделям-основам быстро адаптироваться к новым задачам и областям применения, существенно сокращая циклы разработки. Предварительно обученные на больших объемах данных, эти модели способны эффективно переносить полученные знания на узкоспециализированные задачи, требуя значительно меньше данных для тонкой настройки, чем обучение с нуля. Это особенно ценно в сценариях с ограниченными размеченными данными или при необходимости быстрой итерации и прототипирования новых приложений. В результате, время, необходимое для развертывания решений на основе компьютерного зрения, сокращается в разы, а затраты на обучение снижаются.

Комплексное Управление: Эффективное Внимание для Автономного Вождения
Система управления автомобилем “end-to-end” осуществляет прямое отображение необработанных визуальных данных на команды управления, что позволяет упростить конвейер автономного вождения. Традиционные системы требуют нескольких этапов обработки, включая распознавание объектов, планирование траектории и управление, что увеличивает вычислительную сложность и задержку. В отличие от них, “end-to-end” подход объединяет все эти этапы в единую нейронную сеть, позволяя системе обучаться непосредственно отображению изображений на действия управления, такие как рулевое управление, ускорение и торможение. Это приводит к снижению задержки, повышению эффективности и потенциальному улучшению общей производительности системы автономного вождения.
Эффективность систем автономного вождения, работающих по принципу «end-to-end», напрямую зависит от качества и вычислительной эффективности используемых механизмов извлечения признаков и внимания. Высококачественное извлечение признаков позволяет системе более точно интерпретировать визуальную информацию, а эффективные механизмы внимания — концентрироваться на наиболее релевантных областях изображения, снижая вычислительную нагрузку и повышая скорость обработки данных. Недостаточная эффективность этих компонентов может приводить к снижению точности распознавания объектов, увеличению времени реакции и, как следствие, к ухудшению общей производительности системы автономного вождения.
Для повышения эффективности систем автономного вождения применяется маскированное внимание, использующее признаки, полученные из предварительно обученных (foundation) моделей. Этот подход позволяет системе выборочно фокусироваться на релевантных участках изображения, снижая вычислительную нагрузку и повышая производительность. В частности, разработанный нами метод стохастического выбора участков (Stochastic Patch Selection, SPS) демонстрирует ускорение вывода в 2.4 раза по сравнению с существующими решениями. Использование SPS позволяет динамически определять наиболее важные области изображения для анализа, что оптимизирует использование ресурсов и уменьшает задержку при принятии решений.
Строгая Валидация: Замкнутый Цикл Симуляции для Гарантии Безопасности
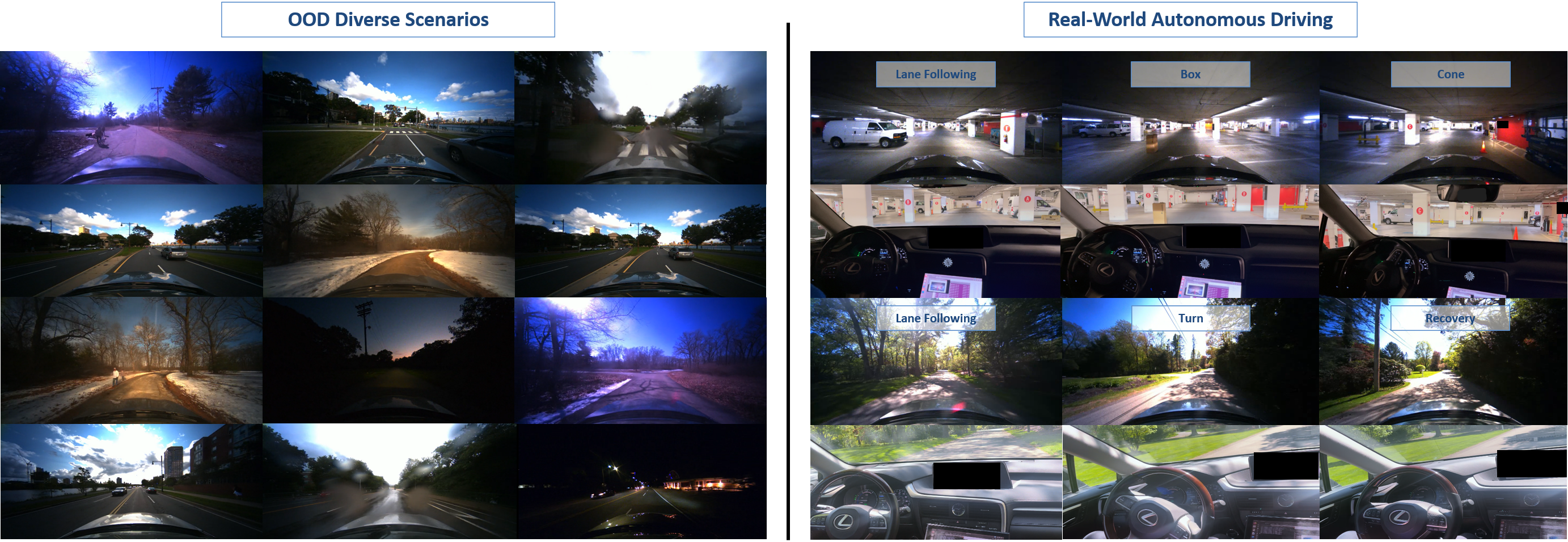
Оценка работы автономных систем в режиме замкнутого цикла, осуществляемая в реалистичном симуляторе, таком как VISTA, представляет собой надежный метод проверки их производительности и безопасности. В отличие от традиционных подходов, основанных на заранее определенных сценариях, симуляция в замкнутом цикле позволяет системе взаимодействовать с динамичной виртуальной средой, реагируя на непредвиденные события и оценивая ее способность адаптироваться к различным условиям. Этот процесс позволяет выявлять потенциальные недостатки и уязвимости в алгоритмах управления еще до проведения испытаний на реальных транспортных средствах, значительно повышая уровень безопасности и надежности разрабатываемых автономных систем. Благодаря возможности многократного повторения и варьирования условий, симуляция в замкнутом цикле обеспечивает всестороннюю оценку, охватывающую широкий спектр дорожных ситуаций и погодных условий.
В рамках закрытого контура симуляции, обучение с управляемой политикой использует привилегированную информацию для создания более надежных и устойчивых алгоритмов управления автономными транспортными средствами. Этот подход позволяет системе не только реагировать на текущую ситуацию, но и предвидеть потенциальные опасности, используя данные, недоступные стандартным алгоритмам. В процессе обучения, система получает дополнительную информацию о скрытых препятствиях или намерениях других участников дорожного движения, что значительно улучшает ее способность принимать обоснованные решения в сложных и непредсказуемых ситуациях. В результате, алгоритмы управления становятся более адаптивными и эффективными, что способствует повышению безопасности и надежности автономного вождения.
Проведенная тщательная валидация демонстрирует, что разработанный метод SPS (Scenario Prediction and Safety) значительно повышает успешность автономного вождения в нештатных ситуациях. В среднем, наблюдается улучшение на 6,2% в сравнении с существующими подходами, что подтверждается результатами моделирования в реалистичной среде. Особенно заметный эффект достигается в сложных сценариях, где показатель успешности увеличивается на максимальные 20,4%. Данные результаты свидетельствуют о повышенной надежности и безопасности системы автономного управления в условиях, выходящих за рамки стандартных тестовых условий, и подтверждают эффективность метода SPS в обеспечении устойчивой работы в непредсказуемых дорожных ситуациях.
Исследование демонстрирует, что избыточность патчей в feature maps, используемых в политиках автономного вождения, не является просто технической деталью, но фундаментальной проблемой, влияющей на обобщающую способность систем. Предложенный метод Stochastic Patch Selection (SPS) подчеркивает необходимость строгого подхода к выбору признаков, отказываясь от всего, что не вносит критически важный вклад в процесс принятия решений. Как однажды заметила Фэй-Фэй Ли: «Искусственный интеллект должен быть не просто умным, но и надежным». Эта фраза отражает суть данной работы — создание систем автономного вождения, способных не просто «работать» в известных условиях, но и демонстрировать предсказуемое поведение в новых, ранее невиданных ситуациях. Строгость и доказательность метода SPS, направленные на устранение избыточности, являются шагом к достижению этой надежности.
Куда Ведет Этот Путь?
Представленная работа, демонстрируя избыточность патч-ориентированных признаков в политиках автономного вождения, неизбежно ставит вопрос о фундаментальной природе представления сцены. Эффективность предложенного метода стохастического отбора патчей (SPS) не отменяет того факта, что само стремление к “полному” описанию визуальной информации может быть ошибочным путем. Следующим шагом видится не просто оптимизация существующих архитектур, а поиск принципиально новых способов кодирования сцены, возможно, вдохновленных не зрением, а другими формами восприятия.
Особенно важно понимать, что улучшение обобщающей способности, достигнутое с помощью SPS, не решает проблему интерпретируемости. Маскирование признаков — это, по сути, уход от необходимости объяснять, почему система приняла то или иное решение. Будущие исследования должны быть направлены на создание моделей, способных не только эффективно действовать, но и предоставлять убедительные доказательства своей логики, иначе мы рискуем создать “черные ящики” на колесах, чьи ошибки будут трудно предсказуемы.
Наконец, следует признать, что акцент на избыточности признаков лишь подчеркивает необходимость более глубокого понимания корреляций между ними. Поиск минимального, но достаточного набора признаков, способного адекватно описывать сцену, — задача, требующая не только вычислительной мощности, но и математической строгости. Иначе говоря, эвристики, пусть и эффективные, всегда останутся лишь компромиссом, а не истинным решением.
Оригинал статьи: https://arxiv.org/pdf/2601.10707.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- Т-Технологии акции прогноз. Цена T
- ТГК-14 акции прогноз. Цена TGKN
- Татнефть префы прогноз. Цена TATNP
- Российский рынок: отчетность компаний, дивиденды и нефтяной фактор – что ждет инвесторов? (28.04.2026 15:32)
- Аэрофлот акции прогноз. Цена AFLT
- Рынок акций и ОФЗ: Ралли на фоне снижения ставки ЦБ и ожиданий от переговоров (16.02.2026 10:33)
- Будущее FIL: прогноз цен на криптовалюту FIL
- Управление рисками в условиях неопределенности: современные подходы
- Пошлины Трампа и падение «ЕвроТранса»: что ждет инвесторов? (21.02.2026 23:32)
2026-01-17 16:13