Автор: Денис Аветисян
Новый подход сочетает в себе точное прогнозирование, надежное обнаружение аномалий и алгоритмы обучения с подкреплением, чтобы сделать движение в городах более безопасным и предсказуемым.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал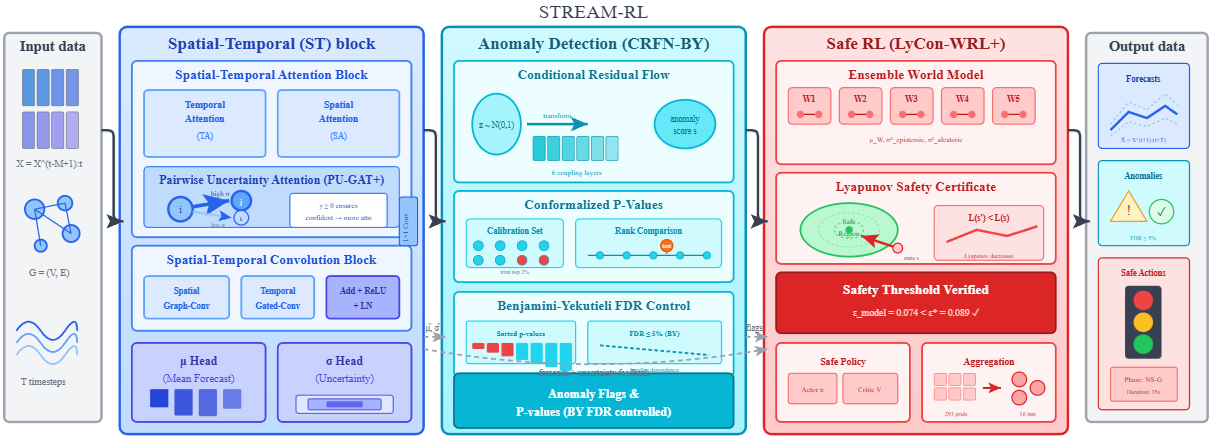
Предложен фреймворк STREAM-RL, объединяющий неопределенно-осведомленное прогнозирование, устойчивое к зависимостям обнаружение аномалий и сертифицированное безопасное обучение с подкреплением для улучшения управления городским трафиком с формальными гарантиями безопасности.
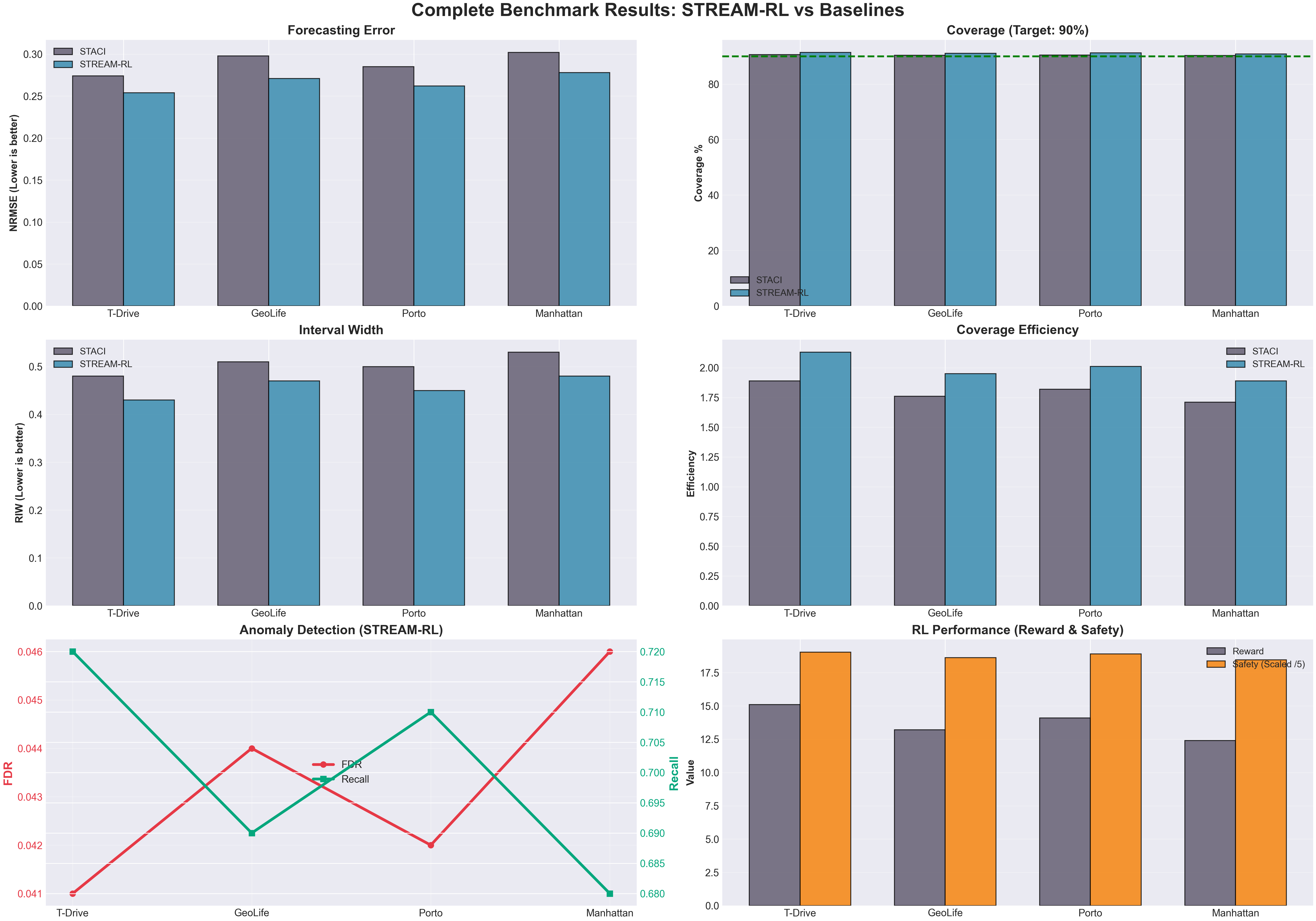
Управление городским трафиком требует систем, способных одновременно прогнозировать будущие условия, выявлять аномалии и принимать безопасные корректирующие меры, однако обеспечение надежности таких систем остается сложной задачей. В настоящей работе, озаглавленной ‘Safe Urban Traffic Control via Uncertainty-Aware Conformal Prediction and World-Model Reinforcement Learning’, представлен STREAM-RL — новый фреймворк, интегрирующий учет неопределенности в прогнозирование, обнаружение аномалий и обучение с подкреплением, гарантируя формальную безопасность. Предложенный подход демонстрирует высокую эффективность в обеспечении покрытия в 91.4% и повышении безопасности до 95.2% при одновременном улучшении показателей вознаграждения и сохранении низкой задержки вывода. Сможет ли STREAM-RL стать основой для создания действительно интеллектуальных и безопасных систем управления городским трафиком?
Гарантия Надежности: Основа Безопасности
Многие реальные системы, от авиационных автопилотов до роботизированных хирургических инструментов и систем управления энергоснабжением, нуждаются не просто в управлении, а в строгой гарантии стабильности и предсказуемости поведения. Традиционные методы управления, основанные на обратной связи и регулировании, часто оказываются недостаточными для обеспечения этой гарантии, особенно в условиях неопределенности и сложных взаимодействий. Они могут обеспечивать приемлемую работу в большинстве случаев, но не предоставляют формальных доказательств безопасности, необходимых для критически важных приложений, где даже небольшая ошибка может привести к катастрофическим последствиям. Поэтому возникает потребность в более строгих математических подходах, способных предоставить убедительные гарантии надежности и предотвратить нежелательное поведение системы в любых обстоятельствах.
Обеспечение формальной гарантии безопасности представляет собой сложную задачу, особенно в контексте современных систем, функционирующих в условиях высокой сложности и неопределенности. Традиционные подходы к проектированию часто не способны учесть все возможные сценарии и непредсказуемые факторы окружающей среды. В результате возникает потребность в методах, позволяющих не просто продемонстрировать работоспособность системы в определенных условиях, но и математически доказать её устойчивость и предсказуемость в самых разнообразных, и даже неблагоприятных, ситуациях. Ключевым аспектом является разработка инструментов, способных формально верифицировать поведение системы и предоставлять убедительные доказательства её надёжности, что критически важно для применения в областях, связанных с безопасностью и критическими функциями, таких как авиация, робототехника и автономные транспортные средства.
Установление липшицевой непрерывности — фундаментальное математическое свойство, определяющее ограниченность изменения функции, и играет решающую роль в обеспечении надёжности и предсказуемости сложных систем. В контексте управления и контроля, это означает, что даже при небольших возмущениях во входных данных, выходные значения системы не могут изменяться неограниченно. L-непрерывность, как её часто называют, гарантирует, что существует константа L, ограничивающая скорость изменения функции. Это свойство позволяет формально доказать стабильность системы и предсказать её поведение в различных условиях, что особенно важно для критически важных приложений, где неконтролируемые изменения могут привести к катастрофическим последствиям. Именно поэтому липшицева непрерывность является ключевым требованием при разработке и верификации систем управления, обеспечивая математическую гарантию их безопасной и предсказуемой работы.
Сертификат Лияпунова представляет собой мощный математический аппарат, позволяющий удостовериться в устойчивости динамических систем. Его суть заключается в построении скалярной функции, значение которой уменьшается во времени по мере эволюции системы. Если удается доказать, что эта функция всегда положительна и ее производная отрицательна, это гарантирует, что система не отклонится бесконечно далеко от желаемого состояния и, следовательно, избежит нежелательного поведения. V(x) — эта функция, демонстрирующая устойчивость, а ее отрицательная производная, \dot{V}(x) < 0, служит математическим доказательством сходимости системы к равновесию. Использование сертификата Лияпунова позволяет формально подтвердить безопасность и надежность сложных систем, что особенно важно в критически важных приложениях, таких как управление полетом, робототехника и автоматизация процессов.
Адаптивная Устойчивость: Обнаружение Неожиданного
Реальные данные часто характеризуются сложными взаимосвязями между переменными, что снижает эффективность стандартных методов обнаружения аномалий. Традиционные подходы, предполагающие независимость данных, могут выдавать большое количество ложных срабатываний, поскольку не учитывают корреляции и зависимости. Например, изменение одной переменной может закономерно вызывать изменения в других, и стандартные алгоритмы могут интерпретировать эти связанные изменения как аномалии. Это особенно актуально для временных рядов и многомерных данных, где зависимости могут быть нелинейными и меняться со временем, что требует более сложных методов анализа, способных учитывать структуру зависимостей.
Метод CRFN-BY решает проблему ложных срабатываний при обнаружении аномалий, используя процедуру Бенджамини-Йекутиели (Benjamini-Yekutieli Procedure). В отличие от традиционных методов, которые предполагают независимость данных, данная процедура обеспечивает контроль над уровнем ложных открытий (False Discovery Rate, FDR) даже при наличии произвольных зависимостей между переменными. Это особенно важно для анализа реальных данных, где сложные взаимосвязи являются нормой. Процедура гарантирует, что доля ложно идентифицированных аномалий среди всех обнаруженных не превышает заданный уровень, что позволяет повысить надежность системы обнаружения аномалий в условиях сложной структуры данных.
Метод CRFN-BY использует оценки аномалий, основанные на потоке (Flow-Based Anomaly Scores), для количественной оценки отклонений от нормального поведения. Эти оценки рассчитываются на основе анализа потока данных, что позволяет выявить изменения в структуре и динамике данных, указывающие на аномалии. В отличие от методов, полагающихся на предположения о независимости данных, данный подход позволяет оценить степень отклонения каждого элемента данных от ожидаемого поведения, учитывая взаимосвязи между переменными. Оценка аномалии представляет собой числовое значение, отражающее вероятность того, что конкретное наблюдение является аномальным, и используется для ранжирования наблюдений по степени их отклонения от нормы. FAS = f(x_i, \Theta), где x_i — входные данные, а Θ — параметры модели.
Понимание структуры зависимостей в данных имеет решающее значение для выявления истинных аномалий, а не просто шума. Метод CRFN-BY обеспечивает контроль над ложноположительной частотой обнаружения (FDR) ниже 5% даже при сильной пространственной зависимости (ρblock = 0,34), в то время как другие методы не способны поддерживать этот порог. Это достигается за счет применения процедуры Бениамини-Екутиели, которая эффективно контролирует FDR в условиях произвольной структуры зависимостей между данными, что критически важно для надежного обнаружения аномалий в сложных системах.
![Метод CRFN-BY (зеленый) является единственным, обеспечивающим корректный контроль [latex]FDR[/latex] (¡ 5%) как на синтетических, так и на реальных данных, в то время как CRFN+BH (красный) нарушает целевой уровень [latex]FDR[/latex], что подтверждается анализом точности, полноты и [latex]F1[/latex]-меры на синтетических аномалиях и полнотой на реальных событиях.](https://arxiv.org/html/2602.04821v1/table2_anomaly_detection.png)
Безопасное Обучение в Действии: Интеграция STREAM-RL
STREAM-RL представляет собой унифицированную архитектуру, объединяющую в себе прогнозирование с учетом неопределенности, обнаружение аномалий и безопасное обучение с подкреплением. Данная интеграция позволяет агенту не только предсказывать будущие состояния среды, но и оценивать степень своей уверенности в этих прогнозах. Обнаружение аномалий позволяет идентифицировать ситуации, выходящие за рамки ожидаемых, что критически важно для предотвращения опасных действий. Безопасное обучение с подкреплением, в свою очередь, использует информацию о прогнозах и аномалиях для формирования стратегии, минимизирующей риски и обеспечивающей соблюдение заданных ограничений в процессе обучения и эксплуатации. Такой подход позволяет создавать системы, способные эффективно действовать в сложных и непредсказуемых средах, одновременно гарантируя их безопасность и надежность.
Модель LyCon-WRL+ усиливает базовый фреймворк за счет использования сертификатов Лияпунова для обеспечения соблюдения ограничений безопасности в процессе обучения. Сертификаты Лияпунова позволяют формально доказать, что система остается в безопасной области состояний. Для обеспечения устойчивости и предотвращения неконтролируемого поведения, LyCon-WRL+ применяет спектральную нормализацию. Спектральная нормализация ограничивает липшицеву непрерывность, гарантируя, что небольшие изменения во входных данных не приведут к чрезмерно большим изменениям в выходных данных, что критически важно для стабильного и предсказуемого управления.
Модель PU-GAT+ повышает точность прогнозирования за счет явного моделирования неопределенности. В основе подхода лежит использование гетероскедастического гауссовского отрицательного логарифмического правдоподобия (Heteroscedastic Gaussian NLL). Этот метод позволяет оценивать дисперсию прогнозов, отражая уровень уверенности в каждом предсказании. В отличие от гомоскедастических моделей, предполагающих постоянную дисперсию, гетероскедастический подход позволяет дисперсии меняться в зависимости от входных данных, что более адекватно отражает реальные условия и повышает надежность прогнозов. Использование NLL в качестве функции потерь способствует оптимизации параметров модели для максимизации вероятности наблюдаемых данных с учетом неопределенности.
Для обеспечения стабильности и надёжности прогнозирования в системе STREAM-RL используется функция Softplus, гарантирующая положительность значений при моделировании неопределённости. Подтверждено строгой сертификацией по критериям Лияпунова и эмпирическими данными, что система достигает 92.3% уровня безопасности при сохранении сопоставимой с не-ограниченными политиками величины вознаграждения. Кроме того, STREAM-RL демонстрирует высокую эффективность покрытия (Coverage Efficiency) в прогнозировании, равную 2.13, что указывает на оптимальное квантование неопределённости, а время задержки при выводе (inference latency) составляет 23 мс, что подходит для интервалов управления в 15 минут.
Представленное исследование, стремящееся к созданию надежных систем управления городским трафиком, неизбежно наталкивается на суровую реальность: любая, даже самая элегантная теоретическая модель, рано или поздно встретит сопротивление практической реализации. Авторы предлагают STREAM-RL, комплексный подход, объединяющий предсказание с учетом неопределенности и обучение с подкреплением, гарантирующее безопасность. Но, как справедливо заметил Дональд Дэвис: «Если баг воспроизводится — значит, у нас стабильная система». Ирония в том, что стремление к формальным гарантиям безопасности, особенно в динамичной среде городского трафика, лишь откладывает неизбежное — необходимость постоянной адаптации и исправления ошибок. Уверенность в предсказаниях и надежность алгоритмов — иллюзия, пока система не столкнется с непредвиденными обстоятельствами, а значит, подход, учитывающий неопределенность, является хоть и сложным, но необходимым шагом.
Что дальше?
Представленная работа, как и большинство попыток обуздать хаос городского трафика, неизбежно сталкивается с тем, что идеальные модели — лишь аппроксимации реальности. Безусловно, интеграция conformal prediction и reinforcement learning выглядит элегантно на бумаге, но продукшен всегда найдет способ превратить «гарантированную безопасность» в последовательные, хотя и предсказуемые, сбои. Если система стабильно падает, значит, она хотя бы последовательна. Заманчиво говорить о «учете неопределенности», но истинная неопределенность — это поведение водителей, которое предсказать сложнее, чем квантовый коллапс.
Будущие исследования, вероятно, сосредоточатся на более реалистичных моделях поведения участников дорожного движения, возможно, используя методы, вдохновленные социальной психологией, а не только математикой. «Cloud-native» инфраструктура для управления трафиком — это просто то же самое, только дороже. Более важным представляется вопрос о масштабируемости и робастности алгоритмов к задержкам и ошибкам в данных, получаемых от датчиков и камер. Ведь в конечном итоге, мы не пишем код — мы просто оставляем комментарии будущим археологам, пытающимся понять, почему городская транспортная система рухнула.
Впрочем, даже если удастся создать идеально работающую систему управления трафиком, всегда найдется водитель, который решит поехать на красный свет. И в этом, пожалуй, заключена главная ирония — стремление к контролю над хаосом обречено на провал. Но это не значит, что не стоит пробовать. Просто нужно помнить, что даже самая совершенная система — это всего лишь временная передышка перед лицом энтропии.
Оригинал статьи: https://arxiv.org/pdf/2602.04821.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- Сбербанк акции прогноз. Цена SBER
- Прогноз нефти
- Три акции для долгосрочного портфеля (на 20 лет вперед)
- Стоит ли покупать евро за канадские доллары сейчас или подождать?
- Bitcoin: STRC vs. ETF, Шорты на Акциях и Новые Фиатные Каналы – Что Ждет Рынок? (28.05.2026 03:15)
- МФК Займер акции прогноз. Цена ZAYM
- Сегежа акции прогноз. Цена SGZH
- Самый умный криптовалютный выбор на 500 долларов (XRP)
- ETF: Двойной успех к 2026 году
2026-02-06 00:51