Автор: Денис Аветисян
В статье представлен инновационный метод, обеспечивающий надежное и эффективное маневрирование роботов в сложных окружениях.

Итеративная оптимизация с использованием функций барьерного управления для предотвращения столкновений в политопических областях.
Обеспечение безопасной навигации роботов сложной формы в загроможденных пространствах остается сложной задачей оптимизационного управления. В данной работе, посвященной ‘Iterative Convex Optimization with Control Barrier Functions for Obstacle Avoidance among Polytopes’, предложен новый итеративный подход, объединяющий функции барьера управления и предсказательное управление на основе модели (MPC) для эффективного обхода политопических препятствий. Ключевым результатом является разработка алгоритма, гарантирующего столкновение-свободную траекторию за счет локальной линеаризации динамики и геометрии робота, сохраняя при этом выпуклость оптимизационной задачи на каждой итерации. Сможет ли предложенный метод обеспечить надежную и масштабируемую навигацию роботов в реальных, динамически меняющихся средах?
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм каналНеизбежность Старения: Вызовы Безопасного Движения Роботов
Традиционные методы управления роботами зачастую испытывают трудности с обеспечением безопасности в непредсказуемых и динамичных средах. Это связано с тем, что большинство алгоритмов полагаются на заранее известные параметры окружающей обстановки и точные модели движения робота, которые редко соответствуют реальности. В условиях, когда появляются неожиданные препятствия, изменяется освещение или возникают другие непредсказуемые факторы, существующие системы контроля могут оказаться неспособными оперативно реагировать и предотвращать столкновения. Особенно остро эта проблема проявляется в сложных, загроможденных пространствах, где робот должен одновременно учитывать множество ограничений и быстро адаптироваться к меняющейся обстановке, что требует разработки более устойчивых и интеллектуальных систем управления, способных эффективно функционировать в условиях неопределенности.
Обеспечение предотвращения столкновений робота требует надежных методов, способных учитывать сложные ограничения и нелинейную динамику движения. В реальности, роботы редко функционируют в идеально предсказуемой среде, и их движения подвержены множеству факторов, таких как трение, инерция, а также взаимодействие с изменяющимся окружением. Разработка алгоритмов, способных точно моделировать эти факторы и предсказывать траекторию движения с учетом нелинейных зависимостей, является сложной задачей. Эффективные методы должны не только учитывать текущее состояние робота и препятствий, но и предвидеть их возможное будущее поведение, обеспечивая безопасное и плавное перемещение даже в условиях высокой неопределенности. Решение этой проблемы требует интеграции продвинутых математических моделей, алгоритмов оптимизации и методов управления, способных эффективно обрабатывать сложные вычисления в режиме реального времени.
Существующие методы обеспечения безопасного движения роботов зачастую опираются на упрощающие предположения, что существенно ограничивает их эффективность и применимость в реальных условиях. Например, многие алгоритмы предполагают статичное окружение или идеальное знание геометрии объектов, игнорируя динамические препятствия и неточности сенсоров. Это приводит к тому, что робот может столкнуться с непредвиденными препятствиями или совершить ошибки в планировании траектории. Более того, упрощение моделей динамики робота, необходимое для снижения вычислительной сложности, снижает точность управления и способность адаптироваться к изменениям в окружающей среде. В результате, такие подходы оказываются неэффективными в сложных, непредсказуемых сценариях, требуя разработки более надежных и адаптивных методов для обеспечения безопасного взаимодействия роботов с окружающим миром.

Барьеры Безопасности: Формальное Гарантирование Ограничений
Функции барьерного управления (Control Barrier Functions, CBF) представляют собой эффективный метод обеспечения соблюдения ограничений безопасности при управлении роботами. В основе подхода лежит определение «безопасного множества» — области в пространстве состояний, в пределах которой робот должен оставаться. CBF формулируются таким образом, чтобы гарантировать, что при определенных условиях управления, система всегда будет оставаться внутри этого безопасного множества. Математически, CBF обычно выражаются как функции, чья отрицательность указывает на нарушение ограничения безопасности. Контроллер проектируется таким образом, чтобы минимизировать скорость изменения этой функции, поддерживая ее отрицательное значение и, следовательно, гарантируя соблюдение ограничений безопасности на протяжении всей траектории движения робота. Данный подход позволяет формально верифицировать безопасность системы и применять его в различных задачах, таких как предотвращение столкновений и ограничение рабочей области робота.
Функции барьерного управления (Control Barrier Functions, CBF) определяют безопасное множество состояний для робота. Стратегия управления, основанная на CBF, проектируется таким образом, чтобы гарантировать, что траектория робота остается внутри этого множества на протяжении всего времени. Это достигается путем включения информации о безопасном множестве в закон управления, что позволяет избежать состояний, которые могут привести к нарушению ограничений или столкновениям. Формально, безопасное множество C определяется как подмножество пространства состояний, и CBF обеспечивает, чтобы производная функции барьера h(x) (где x — состояние робота) оставалась положительной или равной нулю, гарантируя, что система не покидает C.
Ключевым элементом реализации функций барьерного управления (CBF) является использование поддерживающей гиперплоскости для определения границ безопасной области. Эта гиперплоскость математически описывает условие, при котором система остается в пределах допустимого состояния. Формально, она определяется как h(x) \ge 0 , где x — состояние системы, а h(x) — функция, определяющая расстояние до границы безопасной области. Использование поддерживающей гиперплоскости позволяет точно определить границы безопасного множества и разработать стратегии управления, гарантирующие, что система остается в пределах этого множества, обеспечивая тем самым безопасную работу, особенно в сложных и многомерных системах.
Оригинальная формулировка функций барьерного управления (CBF) может столкнуться с ограничениями при работе с системами высокой размерности или сложной динамикой. Это связано с тем, что вычисление и поддержание условий безопасности, определяемых CBF, требует решения задач оптимизации и вычисления градиентов, сложность которых экспоненциально возрастает с увеличением числа переменных состояния системы. В частности, поддержание достаточного уровня классовой поддержки (class-K support) для обеспечения асимптотической безопасности становится вычислительно затратным. Кроме того, для нелинейных систем и систем с ограничениями на входы, определение подходящей функции барьера и обеспечение ее гладкости может представлять значительные трудности, что ограничивает применимость CBF в реальных задачах управления.

Динамика Высшего Порядка: Уточнение Модели для Надежности
Дискретные функции барьера управления высшего порядка (DHOCBF) расширяют возможности традиционных функций барьера (CBF) за счет включения динамики высших порядков. В то время как классические CBF обычно ограничивают скорость изменения состояния системы, DHOCBF учитывают производные более высоких порядков, такие как ускорение и рывок. Это позволяет более точно моделировать поведение робота, особенно в динамических сценариях, где важны не только текущая позиция и скорость, но и их производные. Учет динамики высших порядков позволяет DHOCBF обеспечивать более надежное и плавное выполнение ограничений, предотвращая нарушения, которые могут возникнуть при использовании только информации о скорости и положении. Это особенно важно для роботов, выполняющих сложные маневры или работающих в средах с высокой неопределенностью.
Использование функций барьера высокого порядка (DHOCBF) позволяет создавать более точные модели поведения роботов и улучшать соблюдение ограничений, особенно в динамичных сценариях. Традиционные функции барьера часто упрощают динамику робота, что может приводить к неточным предсказаниям и нарушениям ограничений при быстрых движениях или сложных траекториях. DHOCBF, учитывая производные более высоких порядков, обеспечивает более полное представление динамики робота, включая ускорение и рывок. Это позволяет более точно прогнозировать траекторию движения и, следовательно, эффективно избегать столкновений и поддерживать заданные ограничения на скорость, ускорение и положение робота в изменяющейся среде. Более точное моделирование особенно важно для роботов, выполняющих задачи, требующие высокой скорости и маневренности, таких как навигация в сложных пространствах или взаимодействие с быстродвижущимися объектами.
В DHOCBF (Discrete-time High-order Control Barrier Functions) для представления препятствий и рабочего пространства робота используется политопическое представление. Политоп — это геометрическая фигура, ограниченная конечным числом полупространств, определяемых линейными неравенствами. Это позволяет точно моделировать сложные формы и учитывать ограничения, связанные с движением робота. Использование политопов обеспечивает возможность эффективной проверки принадлежности точки к области, свободной от столкновений, и, как следствие, реализации точного предотвращения столкновений в динамических сценариях. В частности, представление препятствий в виде политопов позволяет свести задачу проверки безопасности к решению системы линейных неравенств, что упрощает вычисления и повышает производительность алгоритма.
Эффективность DHOCBF (Discrete-time High-order Control Barrier Functions) напрямую зависит от скорости и точности решающих оптимизационные задачи, в частности, решателей квадратичного программирования (QP). В процессе работы DHOCBF формулирует задачу оптимизации, включающую ограничения безопасности, выраженные через барьерные функции, и динамику робота. Решение этой задачи, находящееся в основе управления, требует решения QP-задачи на каждом шаге управления. Время решения QP-задачи определяет частоту, с которой система может реагировать на изменения в окружающей среде и поддерживать безопасность. Более того, точность решения QP-задачи влияет на то, насколько близко робот может приблизиться к границам допустимой области, не нарушая ограничений безопасности. Таким образом, выбор и оптимизация решателя QP являются критическими для обеспечения надежной и эффективной работы DHOCBF в реальных приложениях.
Оптимизация Траекторий: Интеграция MPC для Безопасного Движения
В основе оптимизации траекторий робота лежит использование алгоритма модельно-прогнозного управления (MPC). Этот подход позволяет не только планировать оптимальное движение, минимизируя заданный критерий (например, время или энергозатраты), но и гарантировать безопасность, интегрируя ограничения, задаваемые дифференциальной функцией выпуклого набора (DHOCBF). MPC предсказывает будущее состояние робота, основываясь на его динамической модели, и выбирает управляющие воздействия, обеспечивающие достижение цели при строгом соблюдении ограничений безопасности. Таким образом, система способна адаптироваться к изменяющимся условиям и эффективно избегать столкновений, обеспечивая надежную и предсказуемую работу робота в сложных средах.
В основе управления роботом лежит использование динамической модели, позволяющей предсказывать его будущее состояние на заданный горизонт планирования. Модель динамики учитывает такие факторы, как масса робота, инерция, приложенные силы и моменты, а также ограничения на скорость и ускорение. В рамках алгоритма MPC, эта модель используется для оценки возможных траекторий движения, а затем выбираются управляющие воздействия, которые минимизируют заданную функцию стоимости. Эта функция может учитывать различные факторы, например, отклонение от желаемой траектории, энергозатраты или время выполнения задачи. Оптимизация, таким образом, позволяет находить наилучшее сочетание управляющих воздействий, обеспечивающих эффективное и плавное движение робота, предсказывая его поведение и избегая нежелательных ситуаций.
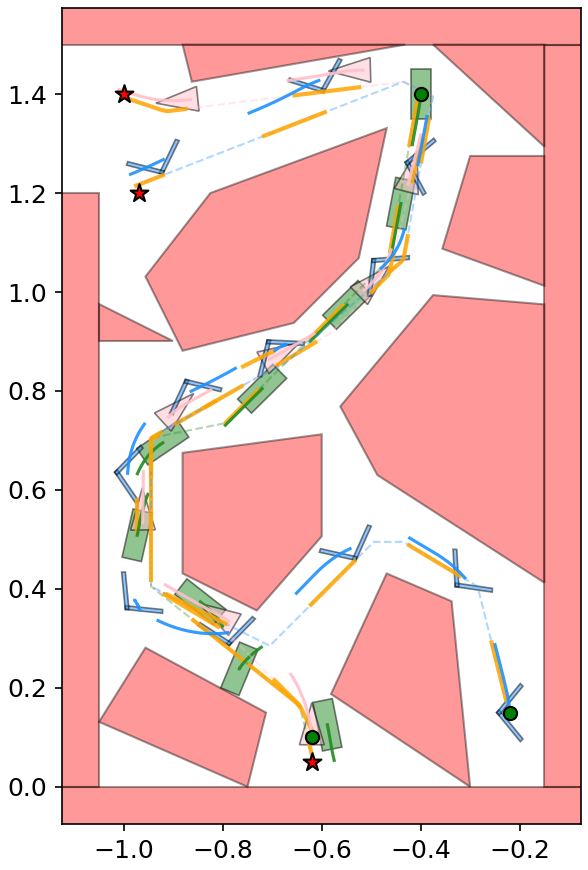
В основе предложенного подхода лежит использование методов выпуклой оптимизации для эффективного решения возникающей оптимизационной задачи. Выпуклость задачи гарантирует нахождение глобального оптимума за относительно короткое время, что критически важно для применения в реальном времени. Благодаря этому, система способна быстро вычислять оптимальные траектории движения робота, учитывая динамические ограничения и требования безопасности, обеспечиваемые DHOCBF. Применение специализированных алгоритмов выпуклой оптимизации позволило достичь вычислений с миллисекундной точностью, что подтверждено экспериментами в двух- и трехмерных средах, а также для роботов различной формы, включая прямоугольные, треугольные и L-образные.
Представленная система демонстрирует возможности предотвращения столкновений в реальном времени, обеспечивая вычисление траектории за миллисекунды. Экспериментальные данные, полученные в двухмерных и трехмерных средах, подтверждают эффективность подхода для роботов различной формы — от простых прямоугольников и треугольников до более сложных L-образных конструкций. Такая скорость вычислений и универсальность геометрии позволяют применять данную систему в широком спектре задач, включая динамическую навигацию в сложных и непредсказуемых условиях, где требуется немедленная реакция на препятствия и сохранение безопасной траектории движения.
Исследование, представленное в данной работе, демонстрирует элегантный подход к проблеме безопасного перемещения роботов в сложных политопических средах. Авторы предлагают итеративную структуру, сочетающую функции барьеров управления и прогнозное управление моделью, что позволяет эффективно избегать препятствий даже при наличии невыпуклых форм робота. Этот метод, по сути, рассматривает каждый шаг оптимизации как запись в летописи системы, а задержку в исправлении возможных ошибок — как неизбежный налог на амбиции. В связи с этим, уместно вспомнить слова Эдсгера Дейкстры: «Программирование — это не столько о том, как сделать что-то, сколько о том, как это сделать правильно». Подход, описанный в статье, стремится к этой “правильности”, обеспечивая надежность и безопасность на каждом этапе планирования траектории.
Что впереди?
Представленная работа, хотя и демонстрирует элегантное решение задачи обхода препятствий, лишь запечатлела момент в непрерывном течении времени. Версионирование, как форма памяти, зафиксировало состояние алгоритма, но не остановило его эволюцию. Ограничения, связанные с политопическими множествами, являются не недостатком, а скорее напоминанием о том, что реальный мир редко бывает идеально гладким. Стрела времени всегда указывает на необходимость рефакторинга, и будущие исследования, вероятно, будут сосредоточены на расширении возможностей работы с более сложными, невыпуклыми формами препятствий.
Особый интерес представляет вопрос о масштабируемости предложенного подхода. В то время как представленная итеративная схема обеспечивает сходимость, ее вычислительная стоимость может стать узким местом в задачах с высокой размерностью или в условиях ограниченных ресурсов. Разработка более эффективных алгоритмов оптимизации, возможно, с использованием методов аппроксимации или декомпозиции, представляется перспективным направлением.
В конечном счете, всякая система стареет — вопрос лишь в том, делает ли она это достойно. Данная работа — не финал, а скорее веха на пути к созданию действительно надежных и адаптивных систем автономной навигации. Истинное долголетие достигается не путем избежания изменений, а путем их предвидения и плавного включения в структуру алгоритма.
Оригинал статьи: https://arxiv.org/pdf/2603.05916.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- Т-Технологии акции прогноз. Цена T
- Будущее SOL: прогноз цен на криптовалюту SOL
- ТГК-14 акции прогноз. Цена TGKN
- Российский рынок: отчетность компаний, дивиденды и нефтяной фактор – что ждет инвесторов? (28.04.2026 15:32)
- ТГК-1 акции прогноз. Цена TGKA
- Ethereum Is Up 30% But Shorts Refuse to Let Go – The Last Time This Setup Didn’t End Quietly
- Татнефть префы прогноз. Цена TATNP
- Управление рисками в условиях неопределенности: современные подходы
- Whoosh акции прогноз. Цена WUSH
2026-03-09 11:00