Автор: Денис Аветисян
Новый подход к построению систем управления позволяет динамически оптимизировать архитектуру, подстраивая ее под текущие требования к вычислительной мощности и точности.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал![Оптимальная композиция сервисов претерпевает изменения - от начального состояния (а) к финальному (b) - в процессе поиска параметра [latex]\alpha^{\star}[/latex], обеспечивающего наилучший компромисс между точностью отслеживания и оптимизацией ошибок.](https://arxiv.org/html/2601.16682v1/x5.png)
В статье представлен фреймворк для адаптивного управления на основе сервисно-ориентированной архитектуры, использующий графовую оркестровку и алгоритмы Contextual Bandits для оптимизации компромисса между временем вычислений и качеством управления.
Построение адаптивных систем управления часто сталкивается с противоречием между вычислительной сложностью и требуемой точностью. В данной работе, посвященной теме ‘Computation-Accuracy Trade-Off in Service-Oriented Model-Based Control’, предложен фреймворк, оптимизирующий компромисс между этими параметрами посредством оркестровки сервисов, рассматриваемой как задача поиска по графу с применением контекстуальных бандитов. Данный подход позволяет динамически конфигурировать архитектуру системы управления в реальном времени, учитывая как требования к производительности, так и ограничения по вычислительным ресурсам. Не приведет ли это к созданию принципиально новых, самооптимизирующихся систем управления, способных к адаптации в условиях неопределенности?
Пределы Традиционного Управления: Поиск Новых Путей
Традиционные системы управления, основанные на заранее заданных алгоритмах и логике, зачастую оказываются неэффективными в условиях динамично меняющейся среды и при возникновении непредсказуемых сбоев. Их работа строится на предположении о стабильности и предсказуемости окружения, что делает их уязвимыми к неожиданностям. В ситуациях, когда реальные условия отклоняются от заложенных в программу, система может демонстрировать неадекватное поведение, приводя к ошибкам и даже авариям. Примером может служить автоматический пилот, столкнувшийся с внезапным порывом ветра или неожиданным препятствием, или роботизированная рука, работающая на конвейере, где внезапно изменилась траектория перемещения объекта. Отсутствие способности к адаптации и самообучению является существенным ограничением для этих систем в сложных и непредсказуемых сценариях.
Традиционные системы управления часто опираются на упрощенные модели, такие как точечная масса или модель однорельсового движения, для облегчения вычислений и снижения сложности. Однако, эта практика неизбежно приводит к потере точности при моделировании реальных сценариев. Например, при управлении транспортным средством, игнорирование таких факторов, как распределение массы, аэродинамическое сопротивление и характеристики дорожного покрытия, может значительно снизить эффективность системы, особенно в сложных условиях — при маневрировании, резких изменениях скорости или на неровной поверхности. В результате, основанные на упрощенных моделях системы управления могут демонстрировать существенные отклонения от желаемой траектории и требовать дополнительных корректировок или, в критических ситуациях, приводить к сбоям и авариям. Использование более детализированных и точных моделей — задача непростая, требующая значительных вычислительных ресурсов, но является необходимым шагом для обеспечения надежности и безопасности современных систем управления.
Традиционные системы управления, в силу своей жёсткой структуры, требуют ручной перенастройки при возникновении изменений в окружающей среде или при появлении нештатных ситуаций. Данная необходимость в ручном вмешательстве значительно замедляет адаптацию системы к новым условиям и приводит к увеличению времени простоя. В отличие от более гибких, самоадаптирующихся решений, каждая модификация параметров или логики работы требует участия специалиста и проведения дополнительных тестов. Это особенно критично в динамичных средах, где быстрое реагирование является ключевым фактором, и может привести к снижению эффективности, увеличению затрат на обслуживание и даже к возникновению аварийных ситуаций. Таким образом, отсутствие автоматической адаптации становится серьёзным ограничением для традиционных систем управления в современных условиях.
Сервисно-Ориентированный Подход: Новый Горизонт Управления
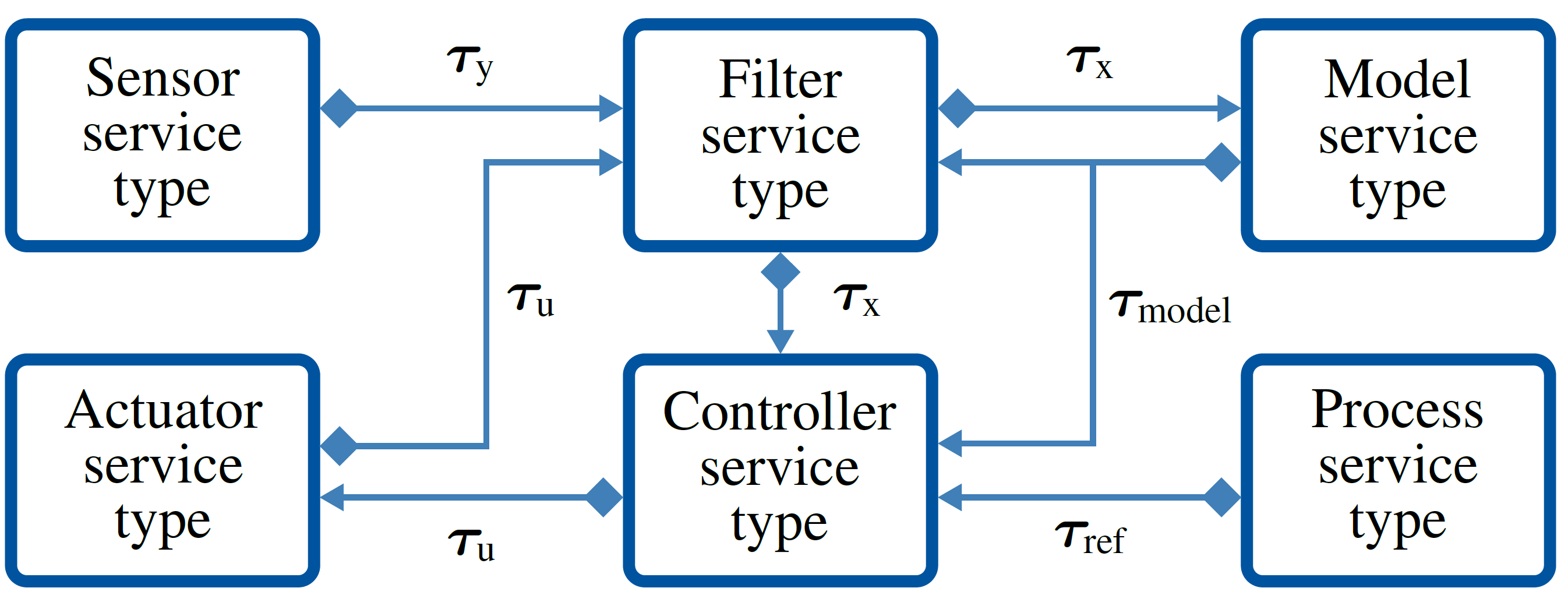
Сервисно-ориентированная архитектура (SOA) предполагает декомпозицию управления на независимые сервисы, что обеспечивает модульность и повторное использование компонентов. Вместо монолитной системы управления, функциональные блоки, такие как датчики, исполнительные механизмы и алгоритмы управления, реализуются как отдельные, взаимодействующие сервисы. Это позволяет независимо разрабатывать, тестировать и обновлять каждый сервис, а также легко интегрировать новые функции или заменять устаревшие. Повторное использование сервисов в различных приложениях и системах снижает затраты на разработку и повышает общую надежность системы за счет проверенного и протестированного кода.
Автомобильная сервис-ориентированная архитектура (ASOA) на ранних этапах показала перспективность в организации управления транспортным средством, однако столкнулась с ограничениями в плане динамической адаптации к изменяющимся условиям. Хотя ASOA и позволяла модульно структурировать компоненты управления, её реализация не предусматривала возможности оперативной реконфигурации и перераспределения функциональности в процессе эксплуатации. Отсутствие механизмов для динамического изменения конфигурации системы в реальном времени препятствовало реализации полноценно адаптивных систем управления, способных оптимизировать работу транспортного средства в различных сценариях и при возникновении нештатных ситуаций. Это ограничивало возможности ASOA в контексте современных требований к автономным и интеллектуальным транспортным средствам.
SOMC (Service-Oriented Motion Control) развивает концепцию ASOA (Automotive Service-Oriented Architecture) путем представления каждого элемента контура управления — датчиков, исполнительных механизмов, алгоритмов управления — в виде независимого сервиса. Управление этими сервисами осуществляется центральным Orchestrator’ом, обеспечивающим динамическую конфигурацию и переконфигурацию системы в реальном времени. Это позволяет адаптировать систему управления к изменяющимся условиям эксплуатации, оптимизировать производительность и добавлять новые функциональные возможности без необходимости полной переработки программного обеспечения. Orchestrator управляет взаимодействием между сервисами, обеспечивая последовательное и корректное выполнение операций в контуре управления.
Интеллектуальное Составление и Оркестровка Сервисов: Динамическая Адаптация
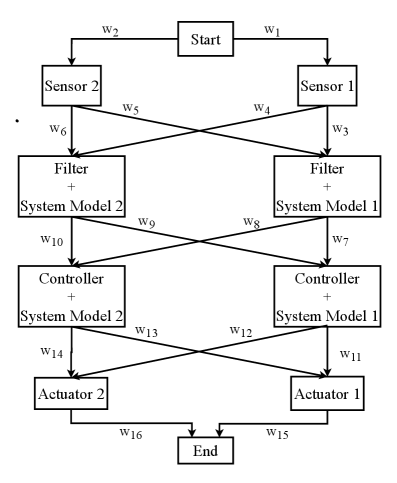
Оркестровка на основе графов использует графы сервисов и графы зависимостей сервисов для представления взаимосвязей между сервисами и снижения сложности поиска. Граф сервисов отображает доступные сервисы как узлы, а зависимости между ними — как ребра, позволяя визуализировать архитектуру и выявлять потенциальные конфликты. Граф зависимостей сервисов детализирует, какие сервисы требуют выполнения других для своей работы, что необходимо для определения порядка выполнения операций. Использование этих графов позволяет алгоритмам оркестровки эффективно обходить пространство возможных комбинаций сервисов, избегая полного перебора и значительно сокращая время поиска оптимального решения. Такой подход особенно важен в динамических средах, где сервисы могут добавляться, удаляться или изменяться.
Для эффективного определения оптимальных композиций сервисов используются алгоритм A и методы планирования на основе искусственного интеллекта (AI). Алгоритм A обеспечивает поиск кратчайшего пути в графе сервисов, минимизируя стоимость выполнения при заданных критериях, таких как время отклика, пропускная способность или стоимость ресурсов. Методы AI Graph-Planning позволяют автоматически генерировать последовательности сервисов, удовлетворяющие заданным требованиям, используя эвристические функции для оценки перспективности различных вариантов и сокращения пространства поиска. Критерии оптимизации задаются в виде целевой функции, которая может учитывать различные показатели качества обслуживания (QoS) и бизнес-требования.
Контекстуальная байесовская оптимизация (Contextual BO) применяется для уточнения многоцелевой функции стоимости при построении сервисных композиций. В отличие от статических назначений весов для различных метрик производительности, Contextual BO динамически изучает оптимальные веса на основе экспериментальных данных, полученных в процессе работы системы. Этот подход позволяет учитывать контекст конкретной задачи и адаптировать функцию стоимости для достижения наилучшего баланса между различными критериями, такими как задержка, пропускная способность и стоимость ресурсов. Использование Contextual BO повышает эффективность поиска оптимальных сервисных композиций, особенно в динамически меняющихся условиях, и позволяет автоматически настраивать систему для достижения требуемых характеристик.
Предварительно объединенные сети сервисов (Pre-joined Service Networks) значительно ускоряют процесс композиции за счет использования графовых баз данных. Вместо динамического поиска и построения путей при каждом запросе, система использует предварительно определенные и сохраненные пути взаимодействия между сервисами, представленные в виде графа. Графовые базы данных обеспечивают быстрый доступ к этим путям, минимизируя задержки, связанные с поиском и построением композиций «на лету». Это особенно эффективно для часто используемых сценариев и позволяет снизить нагрузку на вычислительные ресурсы, необходимые для динамического планирования сервисов.
![Оптимальная композиция сервисов достигается при параметре [latex]\alpha^{\\star}=0.9[/latex], обеспечивающем наилучший баланс между временем вычислений в контексте (1, 6).](https://arxiv.org/html/2601.16682v1/x10.png)
Динамическая Адаптация и Гибкость в Режиме Реального Времени: Преимущества Нового Подхода
Динамическое обновление систем управления позволяет им адаптироваться к меняющимся целям и условиям эксплуатации. В основе этого подхода лежит способность системы выявлять изменения в поставленных задачах и оперативно перестраивать свою структуру, используя динамические компоненты управления. Такая архитектура обеспечивает не только гибкость в реагировании на непредвиденные обстоятельства, но и возможность оптимизации производительности в реальном времени. В результате система способна поддерживать высокую эффективность и стабильность даже в условиях неопределенности и при изменении приоритетов, что особенно важно в сложных и динамичных средах.
Гибкость функционирования в режиме реального времени, достигаемая за счет применения методов переключающего адаптивного управления и оптимизированная с помощью SOMC (Self-Organizing Map Control), позволяет системам эффективно реагировать на возникающие сбои и изменяющиеся условия эксплуатации. Данный подход обеспечивает устойчивую работу даже при частичных отказах компонентов или внезапном изменении поставленных задач. Вместо жестко заданных параметров, система способна динамически перестраивать алгоритмы управления, выбирая наиболее подходящую конфигурацию для текущей ситуации. Такая адаптивность критически важна для автономных робототехнических систем и других приложений, где предсказать все возможные сценарии заранее невозможно, и требуется надежная работа в непредсказуемой среде.
В рамках предложенной сервисной архитектуры реализована интеграция передовых алгоритмов управления, таких как Моделирующее Управление (MPC) и фильтр Калмана. Данное сочетание обеспечивает непрерывную оптимизацию производительности и стабильности системы. В ходе испытаний, применение данных алгоритмов позволило достичь среднеквадратичной ошибки отслеживания 0.026 м/с, что свидетельствует о высокой точности и эффективности предложенного подхода к управлению динамическими системами в различных условиях эксплуатации. Постоянное уточнение параметров и адаптация к изменяющимся условиям позволяют поддерживать оптимальную работу системы даже при наличии возмущений и неопределенностей.
Метод M3C использует взаимосвязи между сервисами для оптимизации их компоновки, что позволяет минимизировать задержки и энергопотребление в условиях ограниченных ресурсов. Первоначальные результаты демонстрируют время вычислений в 34.4 миллисекунды при сохранении высокой точности отслеживания. Дальнейшая оптимизация, направленная на снижение времени вычислений, позволила достичь показателя в 6.7 миллисекунды, однако незначительно увеличила среднеквадратичную ошибку отслеживания до 0.69 м/с. Таким образом, M3C предоставляет гибкий компромисс между скоростью вычислений и точностью, позволяя адаптировать систему к конкретным требованиям и ограничениям среды.
Представленная работа демонстрирует, как сложные системы управления могут возникать из локальных взаимодействий между сервисами. Вместо централизованного проектирования устойчивости, архитектура адаптируется динамически, используя принципы, близкие к самоорганизации. Этот подход особенно интересен в контексте сервисно-ориентированных систем, где нет единого архитектора, контролирующего весь процесс. Как отмечал Поль Фейерабенд: «В науке нет универсальных принципов, только полезные правила». Эта цитата отражает суть исследования — отказ от жёстких, заранее заданных структур в пользу гибкой адаптации к изменяющимся условиям, где точность и вычислительные затраты балансируются посредством графовой оркестровки и алгоритмов обучения с подкреплением.
Куда Далее?
Представленная работа демонстрирует возможность динамической адаптации архитектур систем управления, основанной на компромиссе между вычислительными затратами и точностью. Однако, следует признать, что попытки “оптимизации” подобного рода — это, по сути, лишь локальные решения, порождающие глобальные эффекты. Стремление к централизованному “контролю” над сложностью системы иллюзорно; гораздо вероятнее, что устойчивость возникнет из взаимодействия множества независимых, саморегулирующихся компонентов.
Ключевым направлением дальнейших исследований представляется переход от оптимизации “сверху вниз” к изучению правил, формирующих поведение отдельных сервисов. Важно понять, как малые решения, принимаемые каждым компонентом, влияют на общую стабильность и эффективность системы. Вместо поиска “оптимальной” архитектуры, целесообразно исследовать механизмы самоорганизации, позволяющие системе адаптироваться к изменяющимся условиям без внешнего вмешательства.
Особый интерес вызывает возможность применения принципов обучения с подкреплением не только для выбора сервисов, но и для формирования самих правил взаимодействия между ними. В конечном итоге, истинный прогресс в области управления сложными системами заключается не в создании более совершенных алгоритмов, а в понимании того, как порядок возникает из хаоса без участия архитектора.
Оригинал статьи: https://arxiv.org/pdf/2601.16682.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- Газовый кризис и валютные риски: что ждет российский рынок? (14.03.2026 18:32)
- Будущее WLD: прогноз цен на криптовалюту WLD
- Российская экономика: Бюджетное давление, геополитика и новые экспортные возможности (11.03.2026 21:32)
- PayPal расширяет PYUSD: Альткоины набирают обороты и конфиденциальность становится ключевым трендом (17.03.2026 15:15)
- Нефть, Бюджет и Ставка: Что ждет Российский Рынок в Ближайшее Время? (12.03.2026 15:32)
- После увеличения в цене на 112,700% с момента проведения IPO, стоит ли покупать акции Netflix, продавать их или держать до конца 2025 года?
- Дневник рыночного наблюдателя: почему дивиденды S&P 500 падают и что с этим делать
- Кока-Кола: как одна акция превратилась в 9216, или Капитализм с газировкой 🥤
- Самые умные хай-йелдовые промежуточные акции, которые стоит купить сейчас за $2,000
2026-01-26 14:05