Автор: Денис Аветисян
Новое исследование показывает, как найти компромисс между безопасностью, эффективностью и взаимодействием в управлении беспилотными автомобилями, анализируя данные реальных поездок.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал
Предложен фреймворк для эмпирического определения Парето-фронта в задачах многоцелевой оптимизации автономного вождения, основанный на анализе реальных траекторий и использовании суррогатных показателей безопасности.
Баланс между безопасностью, эффективностью и взаимодействием с другими участниками дорожного движения является ключевой задачей при разработке автономных транспортных средств. В работе ‘Learning the Pareto Space of Multi-Objective Autonomous Driving: A Modular, Data-Driven Approach’ предложен эмпирический подход к определению компромиссов между этими целями на основе анализа реальных траекторий движения. Полученные результаты показывают, что лишь незначительная часть (0.23%) зафиксированных случаев вождения соответствует оптимальному балансу по всем трем критериям, при этом наибольший потенциал для улучшения наблюдается в сфере взаимодействия. Возможно ли создание более совершенных алгоритмов управления, способных приблизить автономные транспортные средства к границе Парето и обеспечить оптимальное сочетание безопасности, эффективности и комфорта для пассажиров и других участников дорожного движения?
Пределы Традиционных Метрик Безопасности
Существующие методы оценки безопасности, основанные на косвенных показателях (Surrogate Safety Measures — SSM), оказываются недостаточными при анализе поведения автоматизированных систем управления транспортными средствами (ADS) в условиях смешанного дорожного движения. Эти показатели, как правило, фокусируются на отдельных аспектах, таких как время до столкновения или минимальное расстояние, и не способны адекватно отразить всю сложность взаимодействия между беспилотным автомобилем и другими участниками дорожного движения, включая водителей, пешеходов и велосипедистов. В результате, оценка безопасности становится упрощенной и может не учитывать критические факторы, определяющие реальный риск аварийности в сложных и динамичных сценариях дорожного движения. Подобный подход не позволяет комплексно оценить способность ADS безопасно и эффективно функционировать в реальных условиях, где поведение участников дорожного движения часто непредсказуемо и требует от системы адаптации и принятия сложных решений.
Традиционные методы оценки безопасности, используемые для автономных транспортных средств, зачастую не способны адекватно отразить сложный баланс между безопасностью, эффективностью и комфортом пассажиров в реальных дорожных ситуациях. Анализ показывает, что существующие системы, ориентированные на оптимизацию лишь одного параметра, достигают приемлемого компромисса между всеми тремя лишь в 0,23% наблюдаемых состояний. Это означает, что, стремясь к максимальной безопасности, автомобиль может значительно снизить свою эффективность и плавность хода, создавая неудобства для пассажиров, или наоборот — ради скорости и комфорта, система может пренебречь потенциальными рисками. Подобный упрощенный подход не позволяет комплексно оценить производительность автономного вождения и требует разработки более совершенных метрик, учитывающих многообразие факторов и взаимосвязей в процессе управления транспортным средством.
Существующие системы оценки безопасности автономных транспортных средств, ориентированные на достижение оптимальных показателей лишь в 0.23% наблюдаемых ситуаций, демонстрируют ограниченность подхода, основанного на единственной цели — минимизации риска столкновений. Исследования показывают, что реальное вождение представляет собой сложный компромисс между безопасностью, эффективностью и комфортом пассажиров. Необходим принципиально новый подход, который позволит оценивать производительность систем автоматического управления с учетом множества взаимосвязанных целей, а не только избежания аварий. Это подразумевает разработку метрик, способных комплексно оценивать поведение транспортного средства в различных сценариях, учитывая не только вероятность столкновения, но и плавность движения, экономичность и соответствие ожиданиям водителя и пассажиров.
Картирование Оптимального Вождения: Эмпирический Парето-Анализ
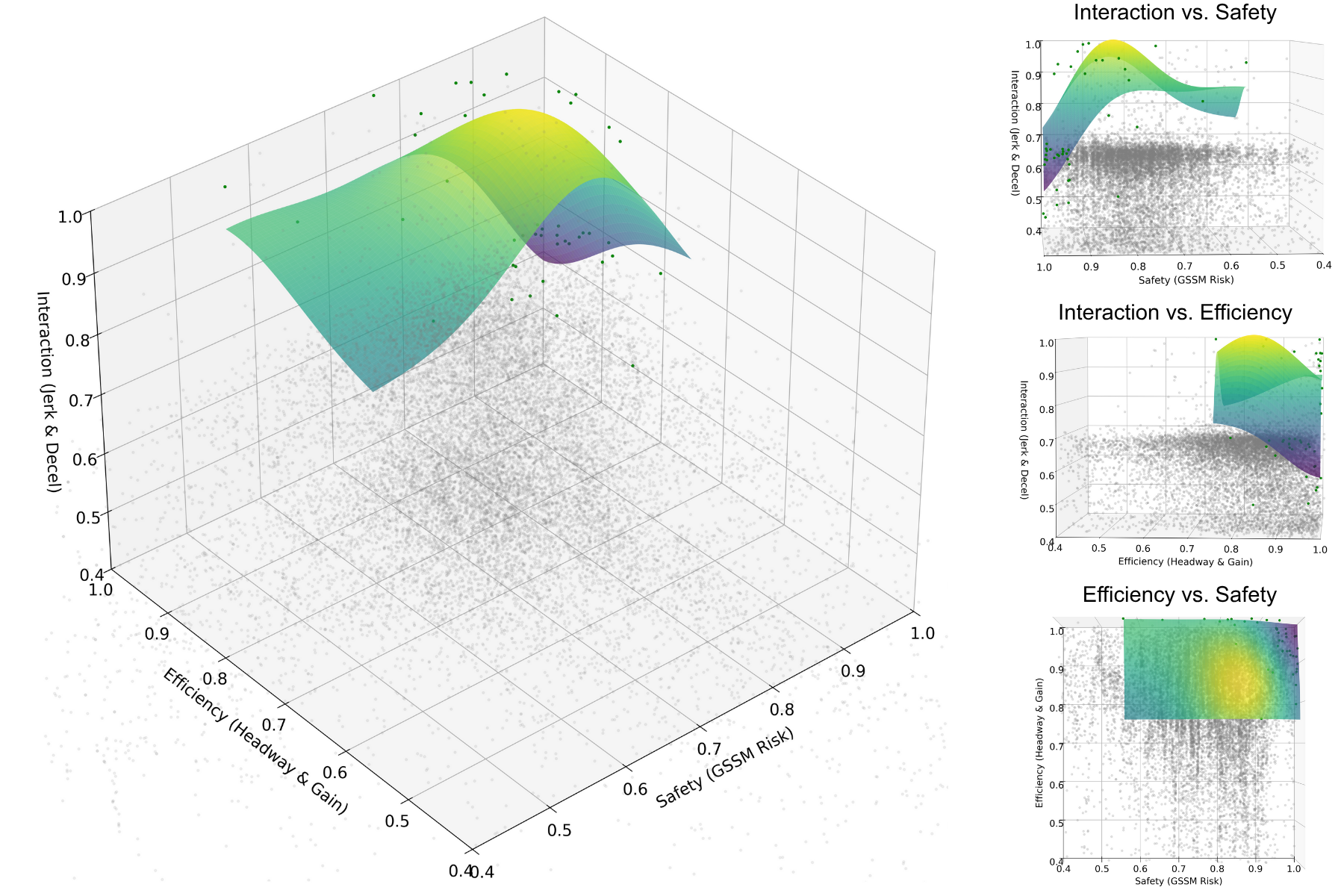
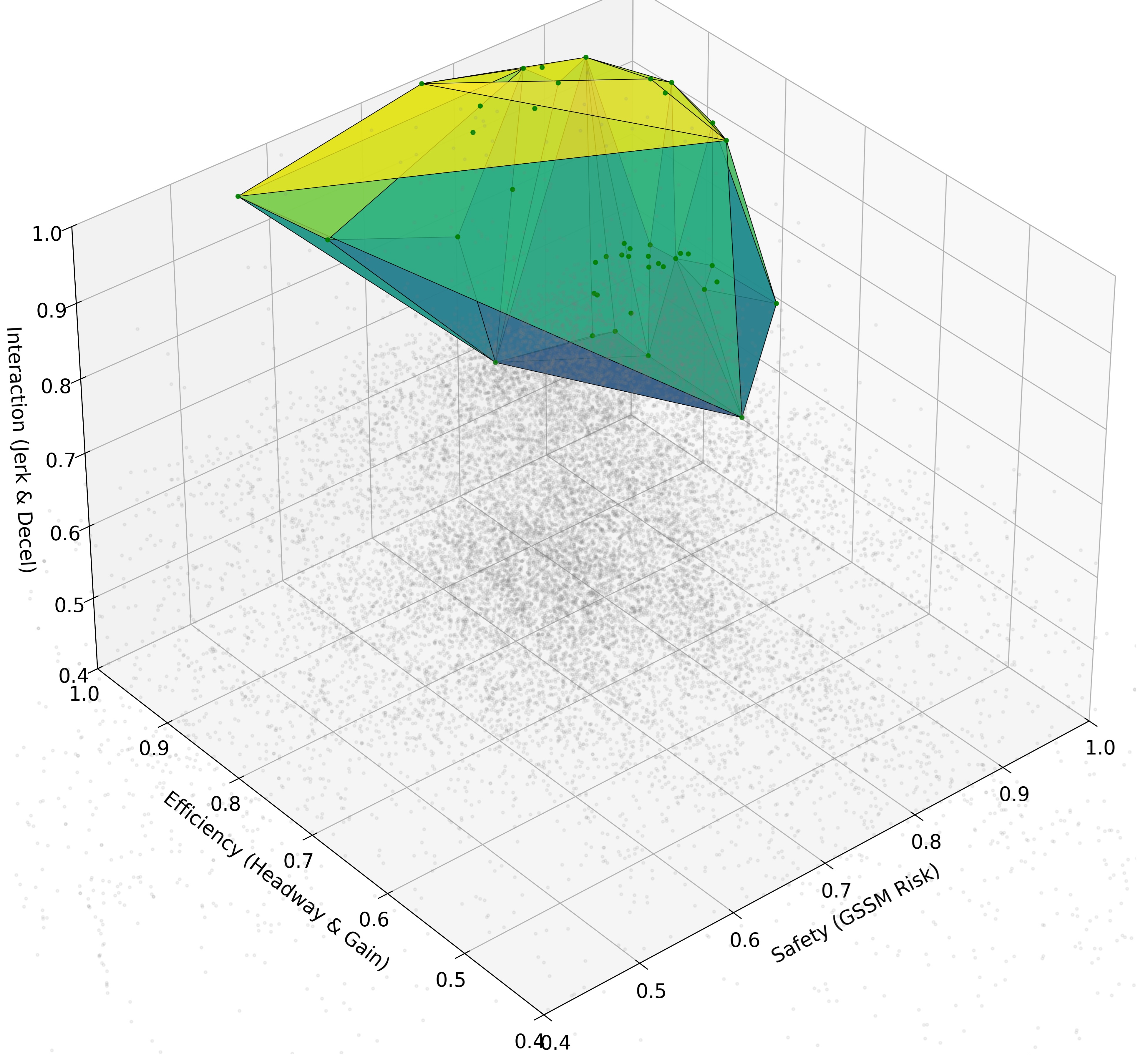
Эмпирический парето-анализ предоставляет методологию для построения парето-оптимальной границы, представляющей собой набор наилучших компромиссов между безопасностью (интенсивностью торможения), эффективностью (дистанцией до впереди идущего транспортного средства — Headway) и плавностью движения (рывком). Данная граница позволяет визуализировать взаимосвязь между этими параметрами и определить точки, в которых улучшение одного показателя не приводит к ухудшению других. Каждый пункт на границе представляет собой оптимальное решение, при котором невозможно одновременно улучшить все три параметра. Анализ предполагает многомерную оптимизацию, где рассматриваются различные сценарии вождения для определения границ допустимых значений и выявления наиболее эффективных стратегий.
Анализ опирается на данные о естественных траекториях движения транспортных средств, собранные в реальных дорожных условиях. Это позволяет выявить фундаментальные ограничения, присущие управлению автомобилем, такие как физические пределы возможностей транспортного средства и время реакции водителя. Используя эти данные, можно определить оптимальные стратегии вождения, максимизирующие безопасность, эффективность и плавность движения, учитывая существующие ограничения. Анализ выявляет закономерности в поведении водителей, позволяя определить границы, за пределами которых возникают риски снижения безопасности или ухудшения других показателей эффективности.
В рамках данного метода, ключевым показателем эффективности является стабильность колонны транспортных средств (String Stability), отражающая способность системы поддерживать согласованное движение и предотвращать усиление возмущений. Разработанная модель прироста стабильности колонны демонстрирует псевдо-R2 равный 0.44, что указывает на способность модели объяснять 44% дисперсии в показателях стабильности и, следовательно, прогнозировать улучшения в динамике движения транспортного потока. Данный показатель подтверждает валидность используемых метрик и перспективность подхода для оптимизации стратегий управления транспортными средствами.
Уточнение Границы: Регрессия Гауссовских Процессов и Сглаживание
Регрессия Гауссовских процессов (ГП) используется для обучения пространству Парето на основе данных траекторий, позволяя захватить непрерывную структуру оптимальных компромиссов. В отличие от дискретных представлений, ГП строит вероятностную модель, определяя распределение над функциями, что позволяет аппроксимировать взаимосвязь между входными параметрами и соответствующими оптимальными значениями. Это особенно важно при анализе многокритериальной оптимизации, где существует бесконечное количество потенциальных оптимальных решений. Применение ГП обеспечивает возможность интерполяции и экстраполяции данных, что позволяет оценить оптимальные решения в областях, где наблюдаемые данные ограничены, и эффективно представлять непрерывную поверхность Парето-оптимальных решений.
В рамках Gaussian Process Regression (GPR) для модели GSSM ядро Radial Basis Function (RBF) эффективно сглаживает поверхность Парето, уменьшая влияние шума и обеспечивая устойчивое представление оптимального поведения. Применение RBF позволяет получить более точную аппроксимацию Парето-оптимальной границы по сравнению с методами, чувствительными к выбросам в данных. Оценка точности модели GSSM с использованием ядра RBF показала среднюю абсолютную ошибку (MAE) в 6.4 метра, что свидетельствует о высокой степени соответствия между предсказанными и фактическими оптимальными траекториями.
Сравнение с представлением в виде выпуклой оболочки (Convex Hull) подтверждает точность и эффективность сглаженной поверхности, полученной с помощью регрессии Гауссовских процессов (GPR) для представления Парето-оптимальной границы. Анализ показал максимальное превышение (overshoot) в 0.0124 и среднее превышение в 0.0061. Эти показатели демонстрируют, что сглаженная поверхность GPR обеспечивает более точное приближение к истинной Парето-оптимальной границе по сравнению с использованием Convex Hull, минимизируя отклонения от оптимальных решений.
К Адаптивному Управлению: Используя Многоцелевое Рассуждение
Изученная парето-оптимальная граница является основой для разработки адаптивных стратегий мультицелевого управления. Она представляет собой набор решений, в которых невозможно улучшить один критерий, не ухудшив другой, что позволяет системе автономного вождения гибко реагировать на изменяющиеся условия и предпочтения водителя. Вместо стремления к оптимизации лишь одного параметра, например, минимального времени прохождения маршрута, данная граница позволяет учитывать компромиссы между скоростью, безопасностью, комфортом и экономичностью топлива. Это создает возможность для более интеллектуального и контекстно-зависимого управления, в котором автомобиль подстраивается под конкретную ситуацию и стиль вождения, обеспечивая оптимальный баланс между различными целями и, как следствие, повышая общую эффективность и безопасность. Система, лишенная жестких рамок, способна к эволюции и адаптации, подобно живой ткани.
Разработанные стратегии управления позволяют оптимизировать процесс вождения в реальном времени, учитывая сразу несколько целей. Вместо стремления к достижению лишь одного параметра, например, минимального времени прохождения маршрута, система способна балансировать между скоростью, безопасностью, плавностью хода и даже комфортом пассажиров. Это достигается за счет постоянного анализа контекста — дорожной обстановки, погодных условий, стиля вождения конкретного пользователя — и адаптации алгоритмов управления в соответствии с предпочтениями водителя. Таким образом, автомобиль не просто выполняет поставленную задачу, а действует разумно и предсказуемо, повышая общую безопасность и улучшая впечатления от поездки.
Современные системы автономного вождения часто ориентированы на оптимизацию единственного параметра, например, скорости или безопасности. Однако, данный подход ограничивает возможности адаптации к сложным и изменчивым дорожным условиям и потребностям окружающих. Новейшие разработки направлены на переход к многоцелевой оптимизации, позволяющей учитывать сразу несколько факторов, таких как комфорт пассажиров, экономичность и соблюдение социальных норм вождения. Анализ существующих данных показывает, что лишь в 0,23% случаев автоматизированные транспортные средства достигают близкого к оптимальному баланса между этими целями, а лишь 3,4% исследуемых состояний демонстрируют значительное улучшение по сравнению со стандартными алгоритмами. Это указывает на существенный потенциал для развития более адаптивных и социально ориентированных систем автономного вождения, способных учитывать контекст и предпочтения водителя для обеспечения более безопасного и комфортного передвижения.
Исследование пространства Парето в автономном вождении неизбежно демонстрирует, что достижение абсолютной оптимизации по всем параметрам — безопасности, эффективности и взаимодействию — утопично. Данная работа лишь подтверждает фундаментальную истину: системы не проектируются, они эволюционируют. Как однажды заметил Джон Маккарти: «Всякий интеллект — это способность видеть аналогии». Это особенно верно при анализе траекторий движения: выявление закономерностей в кажущемся хаосе данных позволяет сформировать представление о компромиссах, на которые неизбежно идет система. Стабильность, в контексте сложного поведения автономного транспорта, — это лишь иллюзия, хорошо кэшированная в виде усредненных моделей и метрик.
Что дальше?
Представленная работа, подобно картографу, нанёсшая на карту пространство Парето автономного вождения, лишь намекает на сложность ландшафта. За каждой точкой на этой границе скрывается обещание, данное прошлому — компромисс между безопасностью, эффективностью и взаимодействием. Однако, стоит признать, что достижение истинного баланса между этими целями — скорее исключение, чем правило. Система, стремящаяся к оптимальности по всем параметрам, неизбежно столкнётся с ограничениями, продиктованными неполнотой данных и непредсказуемостью реального мира.
Будущие исследования, вероятно, будут направлены не на поиск абсолютного контроля, а на развитие систем, способных к самовосстановлению и адаптации. Контроль — это иллюзия, требующая соглашения об уровне обслуживания (SLA), и каждая зависимость — это обещание, которое рано или поздно придётся выполнять. Более того, представляется важным отход от жестких метрик к более гибким, учитывающим контекст и субъективное восприятие.
В конечном итоге, системы автономного вождения — это не инструменты, а экосистемы. Их нельзя построить, только взрастить. И в этом взращивании, в принятии неизбежной неопределенности и несовершенства, кроется истинный путь к устойчивому и надежному автономному вождению. Всё, что построено, когда-нибудь начнёт само себя чинить, и задача исследователей — создать условия для этого естественного процесса.
Оригинал статьи: https://arxiv.org/pdf/2601.18913.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- Газовый кризис и валютные риски: что ждет российский рынок? (14.03.2026 18:32)
- Рубль, ставка ЦБ и геополитика: Что ждет российский рынок в ближайшее время
- Будущее WLD: прогноз цен на криптовалюту WLD
- Нефть, Бюджет и Ставка: Что ждет Российский Рынок в Ближайшее Время? (12.03.2026 15:32)
- Cere Network: Раскрытие Систематического Мошенничества на $157 Миллионов и Связь с Новым AI-Проектом (17.03.2026 22:45)
- Является ли эта искусственная интеллект-транспортационная акция самой большой угрозой амбициям Теслы по созданию автономии?
- Будущее TRX: прогноз цен на криптовалюту TRX
- 5 Причин Купить Акции Energy Transfer, Как Будто Завтра Никогда Не Наступит
- 5 горячих акций, которые взорвут ваш портфель
2026-01-28 21:36