Автор: Денис Аветисян
В статье представлена инновационная методика обеспечения безопасного взлёта беспилотных летательных аппаратов в сложных и непредсказуемых условиях окружающей среды.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал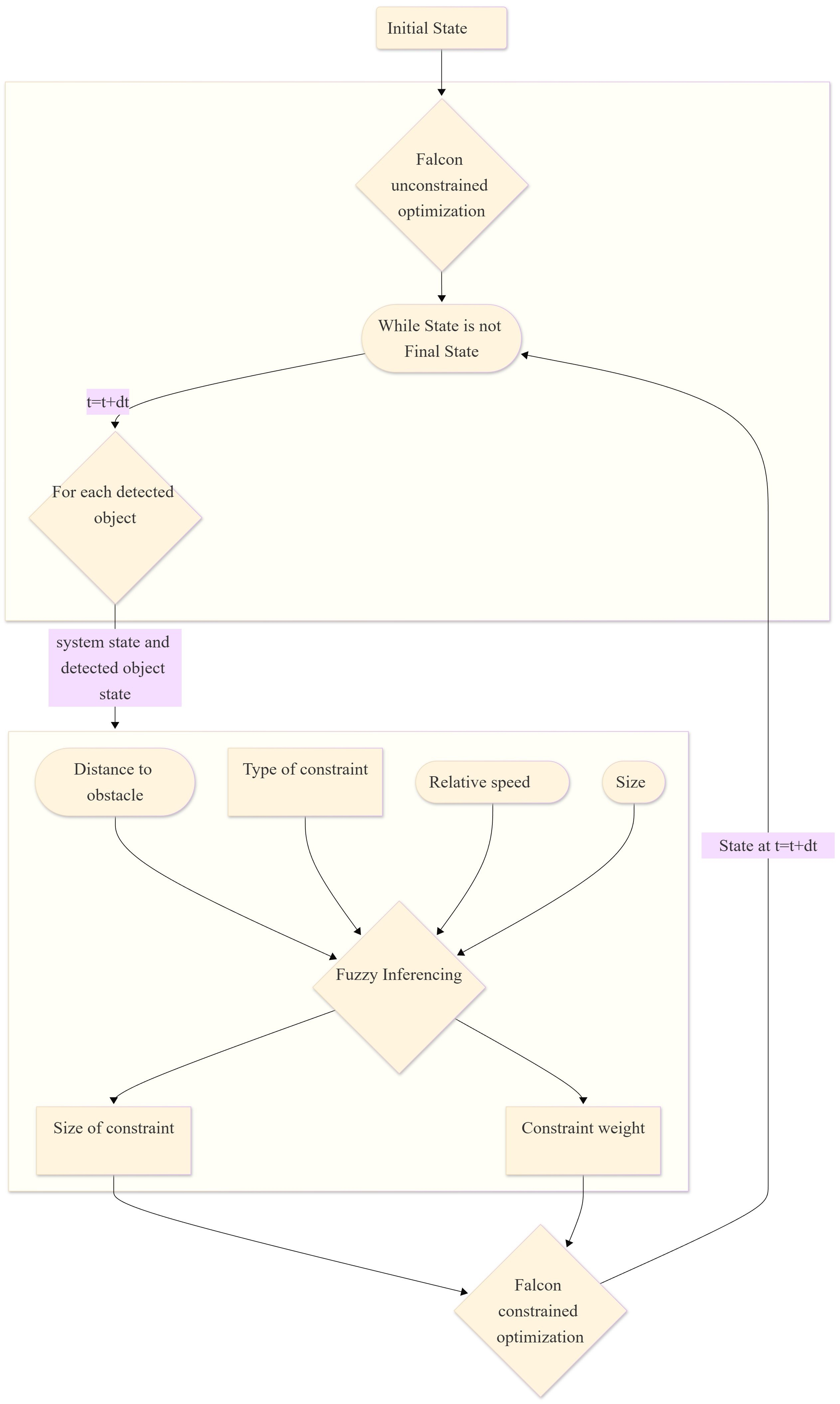
Исследование объединяет нечёткую логику и оптимальное управление для повышения безопасности и снижения вычислительной нагрузки при обходе препятствий.
Несмотря на значительные достижения в области планирования траекторий, обеспечение безопасного и эффективного взлета беспилотных летательных аппаратов (БПЛА) в условиях неопределенности остается сложной задачей. В данной работе, ‘Optimal Take-off under Fuzzy Clearances’, предложен гибридный подход к обходу препятствий, объединяющий оптимальное управление с нечеткой логикой для адаптивной обработки ограничений. Разработанная трехслойная система нечетких правил позволяет модулировать радиусы безопасности, уровни срочности и решения об активации, основываясь на нормативных требованиях и рекомендациях FAA и EASA. Позволит ли интеграция нечеткой логики в систему оптимального управления снизить вычислительную нагрузку и повысить надежность БПЛА в динамически меняющейся среде?
Элегантность Управления: Преодолевая Ограничения Традиционных Подходов
Управление беспилотными летательными аппаратами (БПЛА) требует точной оптимизации траектории полета, что традиционно достигается посредством методов оптимального управления. Эти методы предполагают математическое построение траектории, минимизирующей определенные критерии, такие как время полета или расход энергии, при соблюдении заданных ограничений. В основе лежит решение сложных дифференциальных уравнений, описывающих динамику БПЛА и условия окружающей среды. \min_{u} J(x(t), u(t)) , где J — функционал, определяющий качество траектории, x(t) — состояние системы, а u(t) — управляющее воздействие. Несмотря на свою эффективность, применение методов оптимального управления требует значительных вычислительных ресурсов и часто связано с необходимостью упрощения модели, что может снизить точность и надежность системы управления.
Традиционные методы управления беспилотными летательными аппаратами, хотя и демонстрируют эффективность в идеальных условиях, сталкиваются с серьезными трудностями в сложных, загроможденных препятствиями средах. Необходимость постоянного пересчета оптимальной траектории для обхода каждого препятствия требует колоссальных вычислительных ресурсов, что ограничивает их применение в реальном времени. При этом, попытки упростить вычисления для повышения скорости обработки часто приводят к нарушению ограничений безопасности, ставя под угрозу стабильность полета и увеличивая риск столкновений. В результате, возникает потребность в разработке принципиально новых подходов, способных обеспечить надежное и безопасное управление дронами в динамически меняющихся и сложных условиях окружающей среды.
Одной из ключевых проблем в управлении беспилотными летательными аппаратами является необходимость балансировки между высокой производительностью и возможностью реализации в режиме реального времени, особенно в условиях динамично меняющегося воздушного пространства. Традиционные методы оптимизации траектории, хоть и эффективны в идеальных условиях, испытывают затруднения при работе со сложными окружениями и постоянно меняющимися препятствиями. Необходимость учитывать непредсказуемые факторы, такие как внезапные изменения погоды, появление новых объектов или изменение ограничений по высоте, требует от систем управления не только точного планирования, но и способности к быстрой адаптации и пересчету траектории, что создает значительные вычислительные нагрузки и может приводить к нарушению протоколов безопасности. Поэтому, разработка алгоритмов, способных эффективно справляться с этими вызовами, является важной задачей для обеспечения надежной и безопасной эксплуатации БПЛА в реальных условиях.
Интеллектуальная Адаптация: Введение в Нечеткие Правиловые Системы
Для преодоления ограничений, присущих исключительно оптимальному управлению, предлагается использование Нечеткой Правиловой Системы (НПС) в качестве адаптивного слоя. В отличие от алгоритмов, требующих точного математического описания динамики и ограничений, НПС позволяет оперировать лингвистическими переменными и нечеткими правилами, что обеспечивает более гибкое и робастное управление в условиях неопределенности и неполноты данных. Данный подход позволяет системе адаптироваться к изменяющимся условиям без пересчета оптимального решения, снижая вычислительную нагрузку и повышая общую эффективность. НПС функционирует как дополнение к основной стратегии оптимального управления, расширяя ее возможности и улучшая производительность в сложных сценариях.
В основе работы предложенной системы нечеткого управления (FRBS) лежит использование существующих руководств и регламентов управления воздушным движением для определения безопасных операционных границ и динамической корректировки ограничений на сближение воздушных судов (Clearance Constraints). Эти руководства, включающие в себя установленные нормы минимальных расстояний, скоростей и углов сближения, служат основой для формирования набора правил, определяющих допустимые траектории и маневры. FRBS использует эти правила для адаптивной модификации ограничений, обеспечивая безопасное и эффективное управление воздушным движением в условиях неопределенности и изменяющихся параметров полета, что позволяет расширить возможности базовой стратегии оптимального управления.
Внедрение установленных руководств по управлению воздушным движением в систему позволяет значительно снизить вычислительную нагрузку и повысить устойчивость работы в условиях неопределенности. Использование предопределенных правил, основанных на отраслевых стандартах, упрощает процесс принятия решений, избегая необходимости в сложных вычислениях для каждого сценария. Это позволяет основной стратегии оптимального управления эффективно расширить свои возможности, обеспечивая надежную работу системы даже при наличии неполной или неточной информации об окружающей среде и параметрах полета. Фактически, система становится менее чувствительной к шумам и ошибкам измерений, сохраняя при этом высокую точность и безопасность.
Детали Реализации: Архитектура Такаги-Сугено-Канга
В качестве архитектуры нечеткой логической системы выбрана модель Такаги-Сугено-Канга (TSK). Данная модель отличается способностью эффективно обрабатывать нелинейные зависимости при относительно простой структуре. В TSK-системах правила нечеткого вывода имеют вид: «Если x_1 есть A_1 и x_2 есть A_2 … и x_n есть A_n, то y = f(x_1, x_2, ..., x_n)«, где A_i — нечеткие множества, а f — функция, обычно линейная комбинация входных переменных. Использование линейной функции в заключении упрощает вычисление выходного значения и обеспечивает более гладкий отклик системы, что особенно важно для управления динамическими объектами, такими как БПЛА.
Система использует обнаружение препятствий для оценки окружающей обстановки беспилотного летательного аппарата (БПЛА). На начальном этапе оценки предполагается использование “идеального радара”, что означает отсутствие шумов, ошибок измерения и полную точность определения расстояния до препятствий и их положения. Данное упрощение позволяет сосредоточиться на логике функционирования нечеткой системы управления, исключая влияние погрешностей сенсора на начальных этапах разработки и тестирования. В дальнейшем планируется моделирование реалистичных характеристик радара, включая шум и погрешности, для оценки устойчивости системы к неточностям данных.
Для оптимизации функций принадлежности нечеткого регуляторного базиса, основанного на модели Такаги-Сугено-Канга (TSK), используется генетический алгоритм. Данный алгоритм позволяет автоматически настраивать параметры функций принадлежности с целью достижения максимальной производительности системы управления. Процесс оптимизации включает в себя кодирование параметров функций принадлежности в геном, применение генетических операторов (селекция, кроссинговер, мутация) для создания популяции решений, и оценку каждого решения на основе заданного критерия качества (например, минимизация ошибки управления). Итеративное применение этих операторов обеспечивает эволюцию популяции к оптимальным значениям параметров функций принадлежности, повышая устойчивость и оперативность системы управления БПЛА.
Валидация и Надежность: Оценка Работоспособности Системы
Интегрированная система, объединяющая оптимальное управление и нечеткую логику, демонстрирует значительное повышение устойчивости в условиях загроможденного воздушного пространства. В отличие от традиционных подходов, данная архитектура позволяет беспилотному летательному аппарату (БПЛА) эффективно функционировать даже при высокой плотности препятствий и значительной неопределенности. Нечеткая система, действуя как адаптивный слой, корректирует траекторию полета, предложенную оптимальным контроллером, смягчая влияние непредсказуемых факторов и обеспечивая безопасное расстояние до объектов. Такая комбинация позволяет БПЛА сохранять стабильность и выполнять поставленные задачи в сложных и динамичных условиях, что является критически важным для применения в реальных сценариях, таких как городские полеты или работа вблизи препятствий.
Для всесторонней оценки эффективности разработанной системы в условиях неопределенности воздушного пространства применялось моделирование методом Монте-Карло. Этот подход позволил исследовать поведение беспилотного летательного аппарата (БПЛА) в широком диапазоне сценариев, характеризующихся различными положениями и траекториями препятствий. В ходе симуляций оценивалась способность БПЛА поддерживать безопасное расстояние до объектов, избегая столкновений и обеспечивая стабильность полета. Использование метода Монте-Карло позволило получить статистически достоверную оценку надежности системы в различных условиях, подтверждая ее способность адаптироваться к непредсказуемым ситуациям и гарантировать безопасное функционирование в зашумленной воздушной среде.
Проведенный анализ подтверждает способность разработанной системы адаптироваться к неопределенностям и поддерживать стабильность в сложных воздушных условиях, что представляет собой значительный шаг вперед по сравнению с традиционными методами управления. В ходе исследований было установлено, что предлагаемая концепция обеспечивает ожидаемый интервал обновления данных в 2-3 секунды, что было подтверждено использованием упрощенной модели летательного аппарата. Такая оперативность позволяет оперативно реагировать на изменения в окружающей среде и эффективно избегать столкновений, повышая безопасность полетов в условиях повышенной загруженности воздушного пространства. Полученные результаты демонстрируют перспективность применения данного подхода для создания более надежных и устойчивых систем управления беспилотными летательными аппаратами.
Перспективы Развития: Расширение Стратегий Адаптивного Управления
Дальнейшие исследования должны быть направлены на изучение возможностей использования фильтров Калмана в качестве альтернативы упрощающему предположению о “идеальном радаре” для прогнозирования положения препятствий. В текущей работе, для упрощения расчетов, предполагалось, что данные радара абсолютно точны. Однако, в реальных условиях, радар подвержен шумам и ошибкам измерений. Фильтр Калмана, являясь рекурсивным алгоритмом, способен оценивать состояние системы на основе неточных и зашумленных данных, эффективно фильтруя помехи и повышая точность прогнозирования траекторий препятствий. Это позволит значительно улучшить надежность и безопасность системы управления беспилотным летательным аппаратом, особенно в сложных и динамично меняющихся условиях окружающей среды, где точность предсказания траекторий является критически важной.
Исследования показывают, что применение стратегий рекурсивного горизонтного управления (Receding Horizon Control) способно значительно повысить адаптивность системы к изменениям окружающей среды. В отличие от традиционных подходов, данный метод позволяет не просто реагировать на текущие препятствия, но и прогнозировать их возможное будущее положение, оптимизируя траекторию полета на каждом шаге планирования. Это достигается путем решения задачи оптимального управления на ограниченном горизонте времени, с последующим «сдвигом» этого горизонта и повторением процесса. Таким образом, система постоянно пересчитывает оптимальную траекторию, учитывая новые данные и динамически меняющиеся условия, что обеспечивает более плавное и безопасное маневрирование беспилотного летательного аппарата в сложных и непредсказуемых воздушных пространствах.
Представленная работа закладывает основу для создания полностью автономных беспилотных летательных аппаратов, способных безопасно и эффективно перемещаться в сложных и непредсказуемых воздушных пространствах. Развитие представленных алгоритмов позволит существенно снизить зависимость от вмешательства человека, открывая возможности для широкого спектра применений — от доставки грузов и мониторинга инфраструктуры до поисково-спасательных операций и картографирования местности. Повышение автономности не только увеличивает производительность, но и значительно улучшает безопасность полетов, особенно в условиях плохой видимости или при наличии динамических препятствий. В перспективе, подобные системы могут стать неотъемлемой частью интеллектуальных транспортных систем будущего, оптимизируя воздушное движение и снижая риски, связанные с человеческим фактором.
Исследование, представленное в данной работе, демонстрирует стремление к созданию элегантных решений в области управления беспилотными летательными аппаратами. Авторы предлагают подход, объединяющий нечёткую логику и оптимальное управление, что позволяет снизить вычислительную нагрузку и повысить безопасность полётов в динамических условиях. Этот метод, по сути, отражает представление о том, что структура определяет поведение системы. Барбара Лисков однажды заметила: «Хорошие проекты заслуживают хорошей документации». Эта фраза перекликается с необходимостью четкого определения правил и ограничений в предложенной системе нечёткой логики, поскольку именно ясность и точность позволяют создавать надёжные и предсказуемые решения, даже в условиях неполной информации или нечётких границ, как это происходит в задачах обхода препятствий.
Что дальше?
Представленная работа, стремясь к элегантности управления в условиях неопределённости, неизбежно обнажила границы своей применимости. Несовместимость с современными вычислительными инструментами — не техническая случайность, а закономерный симптом. Всё ломается по границам ответственности — если они не видны заранее, последствия будут болезненны. Необходимо осознать, что оптимизация траектории, даже с применением нечёткой логики, остается лишь частью сложной системы управления воздушным движением. Игнорирование целостности системы, попытки «починить» одну её часть без понимания взаимосвязей, обречены на провал.
Перспективные направления исследований лежат в области адаптивности и робастности. Нечёткие правила, хотя и позволяют снизить вычислительную нагрузку, нуждаются в динамической перекалибровке, учитывающей меняющиеся условия окружающей среды и характеристики самих летательных аппаратов. Необходимо искать способы интеграции предложенного подхода с более широкими моделями поведения, учитывающими взаимодействие множества автономных агентов.
Следующим шагом видится отказ от жёстких границ ответственности между алгоритмами планирования и управления. Необходимо разработать системы, способные к самодиагностике и самовосстановлению, предвидящие потенциальные слабые места и адаптирующиеся к непредсказуемым ситуациям. Ведь, как известно, структура определяет поведение, а простота — ключ к надёжности.
Оригинал статьи: https://arxiv.org/pdf/2602.13166.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- Серебро прогноз
- Мечел акции прогноз. Цена MTLR
- АЛРОСА акции прогноз. Цена ALRS
- Геополитика, Швейцарский Цифровой Франк и Инсайдерская Торговля: Обзор Ключевых Событий Недели (08.04.2026 13:45)
- XLP против VDC: Более низкие комиссии или более широкое покрытие?
- Российский рынок: между нефтью, рублем и геополитикой: обзор ключевых трендов и перспектив (04.04.2026 01:32)
- Стоит ли покупать доллары за новозеландские доллары сейчас или подождать?
- ЭсЭфАй акции прогноз. Цена SFIN
- Группа Аренадата акции прогноз. Цена DATA
2026-02-16 13:28