Умное вождение: как увидеть главное и обойтись малым
![В предложенном методе достигается повышение эффективности и обобщающей способности за счёт введения стратегий отбора патчей (стохастического и матричного) и последующего реструктурирования дескрипторов путём маскировки или удаления невыбранных, что позволяет снизить время вычислений в 2.4 раза при сохранении пространственной семантики, при этом маскировка осуществляется посредством модификации матрицы внимания с использованием параметра [latex]r[/latex] и функции [latex]f[/latex], определяющей вес патча в зависимости от расстояния между его элементами.](https://arxiv.org/html/2601.10707v1/Results/Algorithm_Update_Horizontal_Enhanced.png)
Новое исследование показывает, что для эффективного управления автомобилем не обязательно обрабатывать всю визуальную информацию, а достаточно фокусироваться на ключевых элементах.
Новое исследование показывает, что для эффективного управления автомобилем не обязательно обрабатывать всю визуальную информацию, а достаточно фокусироваться на ключевых элементах.
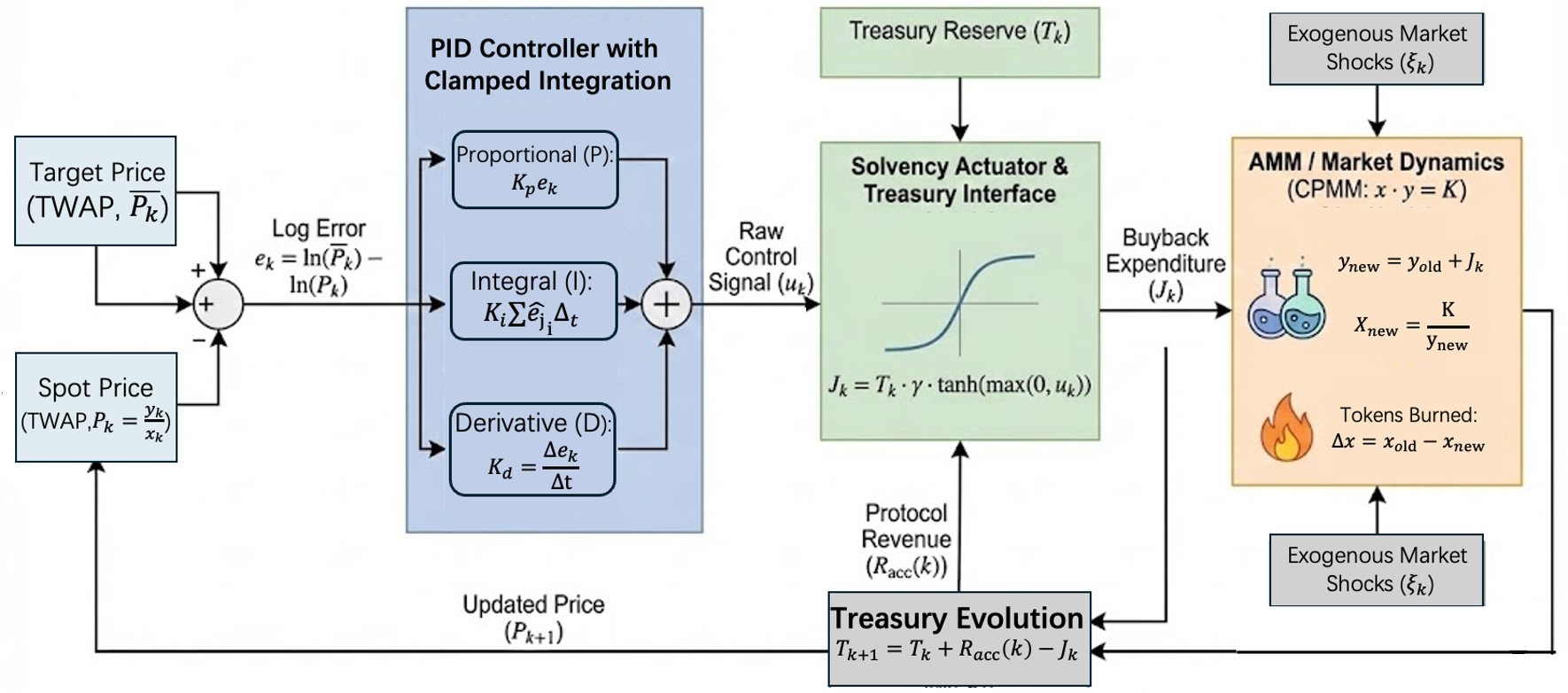
В статье предлагается инновационный метод стабилизации токеномики децентрализованных сетей искусственного интеллекта, основанный на принципах теории управления.
В статье представлена оригинальная операторная теория для работы с броуновским движением с высокой шероховатостью, предлагающая альтернативу традиционным подходам.
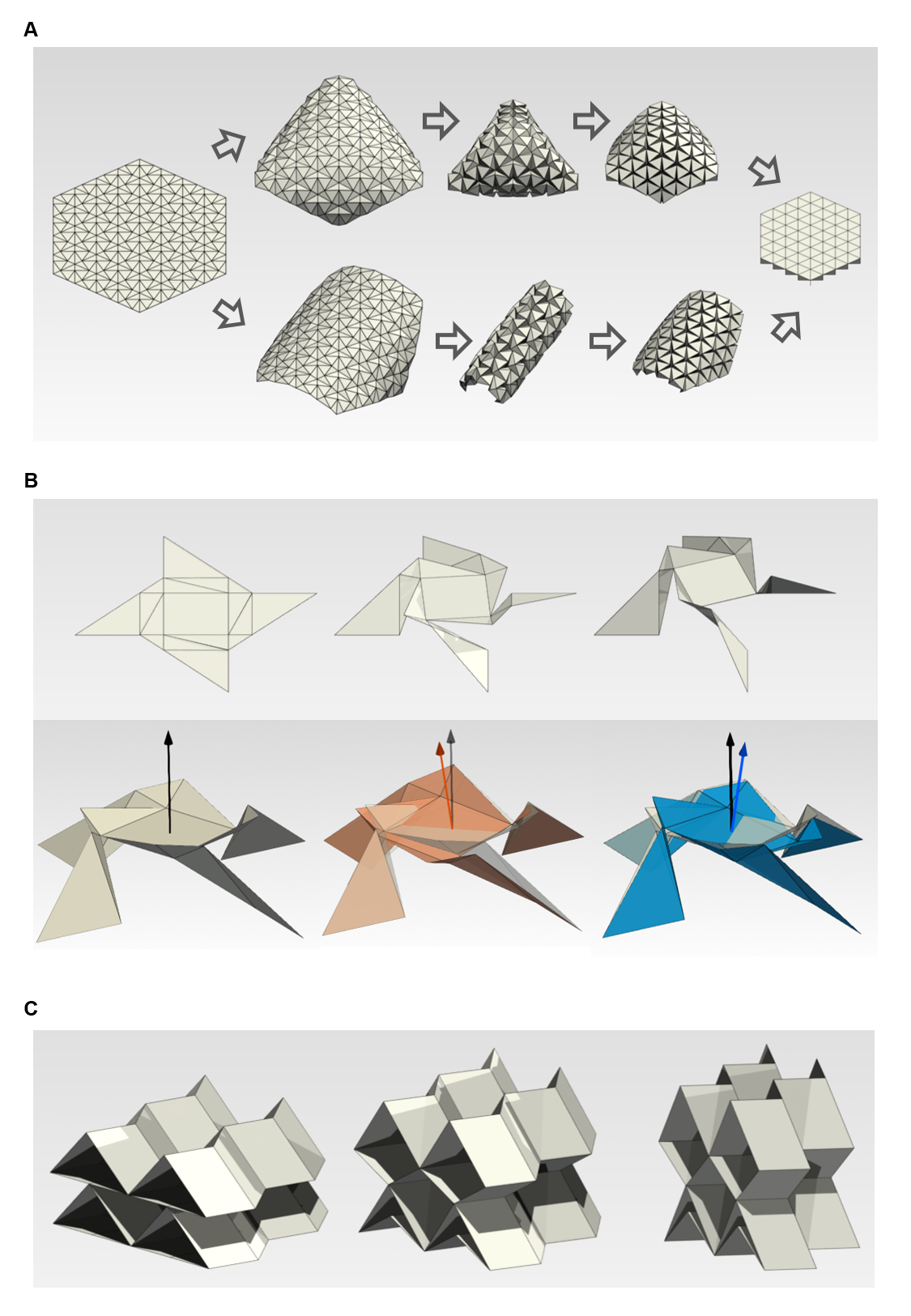
В статье представлена унифицированная платформа для анализа движения жестких складных структур, позволяющая моделировать сложные геометрические конфигурации.
![Предложенный стохастический подход к сокращенному порядку моделирования (ROM) включает в себя вероятностный энкодер, латентное стохастическое дифференциальное уравнение (SDE) и вероятностный декодер, позволяя, на основе параметров μ, вынуждающей функции [latex]f(t)[/latex] и начального условия [latex]u_0[/latex], кодировать начальное условие в латентное пространство, решать латентное SDE для получения траекторий и декодировать полученные траектории для прогнозирования стохастического отклика исходной полномасштабной модели (FOM) [latex]u(t)[/latex], что позволяет получить как среднее значение прогноза, так и статистические границы погрешности.](https://arxiv.org/html/2601.10690v1/x1.png)
Новый подход позволяет эффективно моделировать сложные динамические системы, используя данные и методы стохастического понижения размерности.