Автор: Денис Аветисян
Новый подход к децентрализованному управлению позволяет группам роботов эффективно строить карты сложных пространств, используя возможности машинного обучения.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал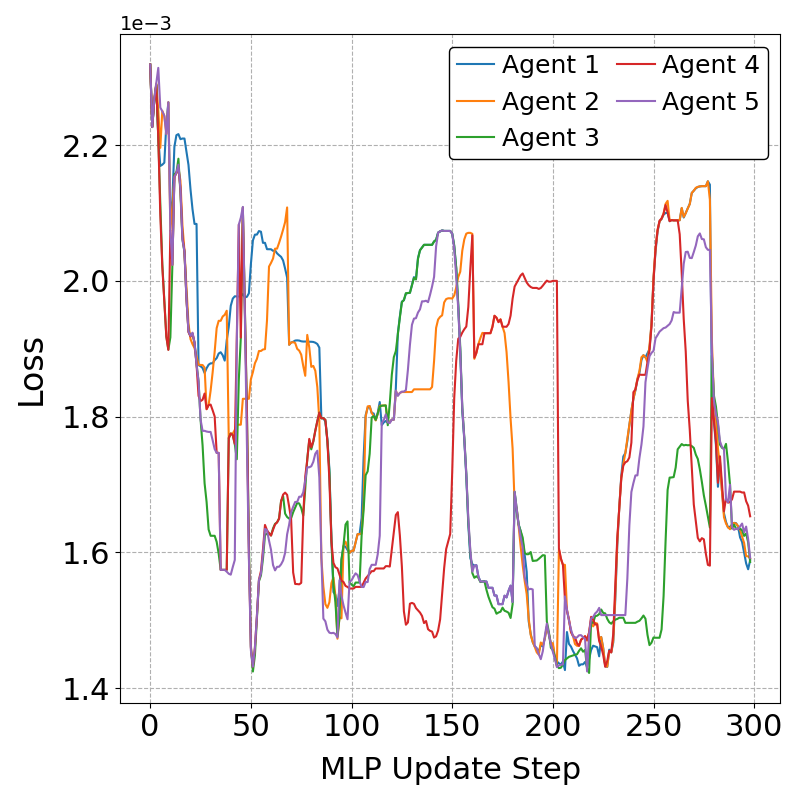
Представлена AI-усиленная система Density-Driven Optimal Control (D2OC) для децентрализованного картографирования окружающей среды, основанная на метрике Вассерштейна и оптимальном транспорте.
Несмотря на эффективность существующих алгоритмов покрытия, их производительность существенно снижается при картографировании среды в условиях ограниченной сенсорной информации и связи. В данной работе представлен новый подход — ‘AI-Augmented Density-Driven Optimal Control (D2OC) for Decentralized Environmental Mapping’ — децентрализованная система управления на основе искусственного интеллекта, предназначенная для построения карт сложной пространственной структуры. Предложенный метод обеспечивает адаптивное уточнение локальных оценок плотности, используя оптимальный транспорт и нейронные сети, что позволяет достичь высокой точности и масштабируемости. Способствует ли такое сочетание алгоритмов оптимального транспорта и машинного обучения созданию более робастных и эффективных систем автономного картографирования?
Картирование Неизвестного: Вызовы Экологического Мониторинга
Традиционные методы экологического картирования зачастую опираются на предположение о полноте собранных данных, что является существенным ограничением в реальных, динамично меняющихся условиях. В природе редко удается получить исчерпывающую информацию о состоянии окружающей среды; данные могут быть неполными из-за технических ограничений, труднодоступности определенных территорий или временных факторов. Например, мониторинг загрязнения воздуха или распространения вредных веществ в водоемах требует постоянного сбора информации, который не всегда возможен в режиме реального времени или на всей интересующей территории. Эта неполнота данных приводит к неточностям в формировании карт и моделей, что снижает эффективность принимаемых мер по защите окружающей среды и требует разработки новых подходов, способных эффективно работать с неполной информацией и неопределенностью.
Существующие методы экологического мониторинга часто сталкиваются с проблемой непостоянства данных, особенно при картировании потенциально опасных зон. Неполное покрытие территории, вызванное техническими ограничениями или сложностью доступа, требует разработки устойчивых стратегий обработки информации. Традиционные подходы, предполагающие наличие полной картины, оказываются неэффективными в условиях фрагментарных измерений. Поэтому, всё большее внимание уделяется алгоритмам, способным реконструировать общую картину на основе неполных данных, оценивать степень риска на основе вероятностных моделей и адаптироваться к меняющимся условиям, что позволяет более эффективно оценивать и прогнозировать распространение опасных веществ или явлений даже при ограниченной информации.
Для эффективного экологического мониторинга требуется разработка методов интеллектуального исследования и картографирования окружающей среды, способных функционировать в условиях ограниченной или прерывистой связи. Такие системы не должны полагаться на постоянный поток данных, а вместо этого должны уметь самостоятельно принимать решения о приоритетных областях для исследования и использовать имеющуюся информацию для построения наиболее полной картины. Используя алгоритмы активного обучения и вероятностное моделирование, подобные системы способны оптимизировать траекторию исследования, фокусируясь на областях с наибольшей неопределенностью и потенциальным риском, даже при отсутствии постоянной связи с оператором или центральным узлом управления. Это позволяет значительно повысить эффективность мониторинга, особенно в труднодоступных или опасных регионах, где традиционные методы сбора данных оказываются непрактичными или слишком дорогостоящими.
В условиях мониторинга окружающей среды, необходимость в эффективном исследовании территорий имеет первостепенное значение, поскольку полный охват местности зачастую невозможен и требует значительных ресурсов. Тщательный, исчерпывающий поиск, предполагающий проверку каждого участка, не только экономически нецелесообразен, но и практически неосуществим, особенно в обширных или труднодоступных регионах. Вместо этого, современные подходы делают акцент на разработке интеллектуальных стратегий, позволяющих целенаправленно исследовать наиболее вероятные места возникновения угроз или зон повышенного риска. Это достигается за счет использования алгоритмов оптимизации маршрутов, анализа данных дистанционного зондирования и адаптации к поступающей информации, что позволяет с максимальной эффективностью использовать доступные ресурсы и получать наиболее полную картину состояния окружающей среды.
Интеллектуальное Исследование: AI-Усиленный D2OC
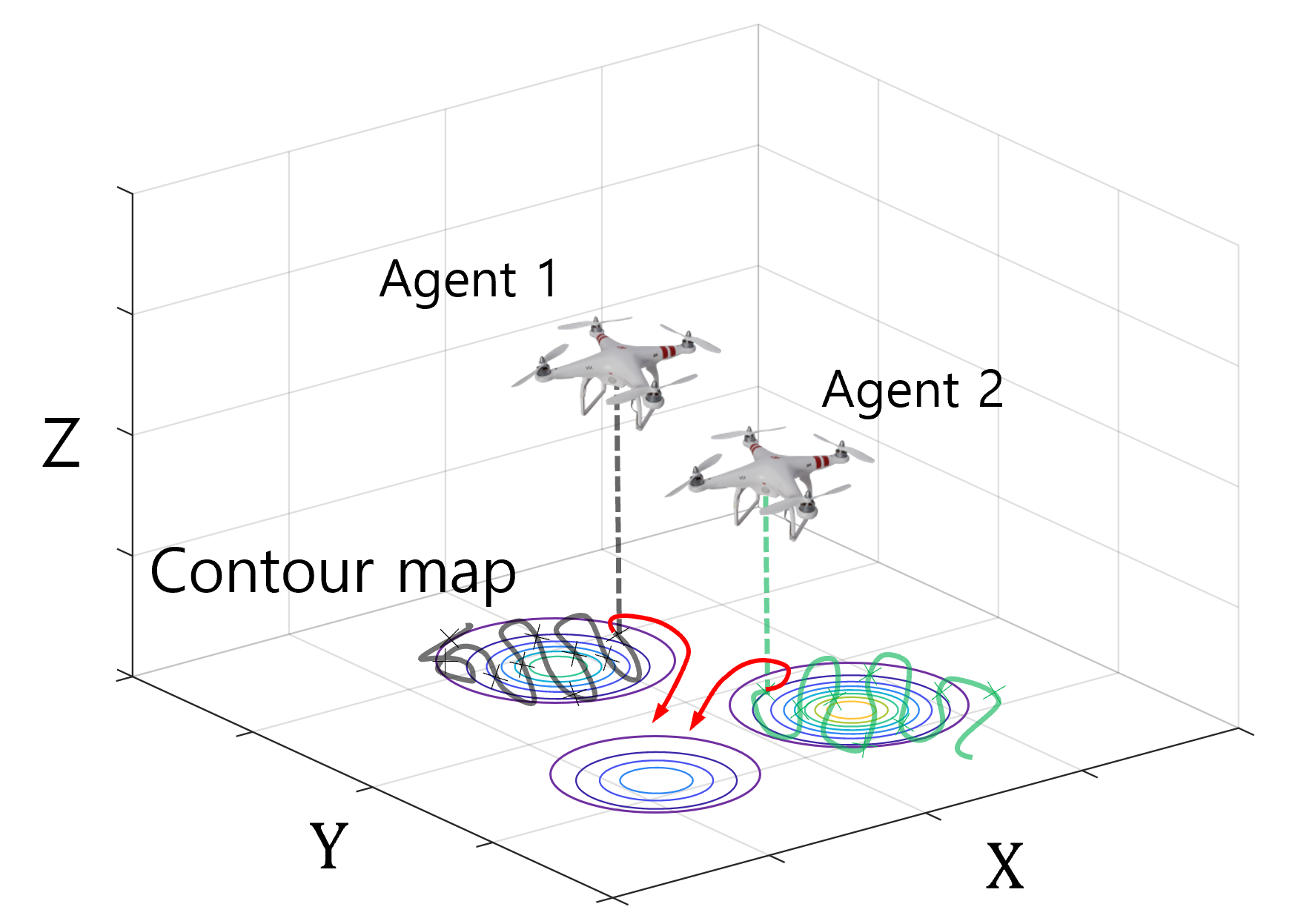
В основе AI-усиленного D2OC-фреймворка лежит механизм динамической генерации выборок и адаптивного взвешивания, позволяющий приоритизировать исследование критически важных областей. Данный подход предполагает формирование новых выборок на основе оценки текущей неопределенности среды и присвоение им весов, отражающих потенциальную информативность. Более высокие веса назначаются областям, где ожидается получение наибольшего количества новых данных, что способствует эффективному исследованию и снижает время, необходимое для построения полной карты среды. Адаптивное взвешивание позволяет системе гибко реагировать на изменения в окружающей среде и перераспределять ресурсы для исследования наиболее перспективных участков.
В рамках системы используется архитектура, состоящая из двух многослойных персептронов (MLP) для оценки неопределенности окружающей среды и направления исследования в области с наибольшим потенциалом получения информации. Функция потерь MLP-AdaptiveStd демонстрирует стабильную адаптацию даже при ограниченной связи между агентами, что подтверждается ограниченными колебаниями в диапазоне от 1.4e-3 до 2.4e-3. Данный диапазон свидетельствует о контролируемой оптимизации и предотвращении расхождений в процессе обучения, обеспечивая надежную работу системы в условиях неполной информации и коммуникационных ограничений.
В рамках данной системы используется понятие “виртуальной неопределенности” для стимулирования исследования ранее непосещенных областей. Виртуальная неопределенность присваивается каждой области, не посещенной агентами, и служит дополнительным сигналом для алгоритма исследования. Это позволяет агентам целенаправленно исследовать новые территории, даже если фактическая неопределенность, основанная на сенсорных данных, отсутствует. Механизм виртуальной неопределенности гарантирует более полное покрытие исследуемой области и повышает эффективность поиска информации, особенно в ситуациях, когда сенсорные данные ограничены или ненадежны. Данный подход обеспечивает систематическое исследование пространства, предотвращая зацикливание агентов в хорошо изученных областях и способствуя обнаружению ранее неизвестных объектов или характеристик окружающей среды.
Система AI-Augmented D2OC разработана для эффективной работы в условиях прерывистой связи между агентами. Для обеспечения устойчивости к таким ограничениям используется децентрализованный подход к принятию решений, позволяющий каждому агенту функционировать автономно при отсутствии прямой связи с другими. Коммуникация между агентами используется для обмена информацией о разведанных областях и обновления оценок неопределенности, однако система способна поддерживать функциональность даже при полной потере связи, используя локальные оценки и алгоритмы адаптации. Такая архитектура повышает надежность системы в сложных и нестабильных средах, где связь может быть ограничена или ненадежна.
Стратегическое Покрытие для Эффективного Картографирования
Стратегии неравномерного покрытия территории позволяют приоритизировать картографирование областей с повышенной значимостью или плотностью объектов, что существенно повышает эффективность исследования. Вместо равномерного сканирования всей доступной области, система концентрирует ресурсы на участках, представляющих наибольший интерес для поставленной задачи, например, на зонах с высокой вероятностью обнаружения препятствий или целевых объектов. Это достигается за счет адаптивного изменения разрешения и частоты сканирования в зависимости от локальной плотности данных и степени важности области, что позволяет сократить время и вычислительные затраты на создание точной модели окружающей среды.
Для реализации неравномерного покрытия используются различные методы, включая Эргодическое исследование (Ergodic Exploration), которое стремится посетить все значимые области пространства с оптимальной частотой. Покрытие, основанное на теории информации (Information-Theoretic Coverage), максимизирует уменьшение неопределенности в карте, фокусируясь на областях, предоставляющих наибольший объем новой информации. В свою очередь, распределенный оптимальный транспорт (Distributed Optimal Transport) позволяет эффективно планировать траекторию движения для сбора данных, минимизируя затраты на перемещение и обеспечивая равномерное покрытие целевых областей, даже в сложных и динамичных условиях. Комбинация этих подходов позволяет адаптировать стратегию покрытия к конкретным требованиям задачи и характеристикам окружающей среды.
Направляя усилия по построению карты на критически важные области, система значительно сокращает время и ресурсы, необходимые для создания точной модели окружающей среды. Это достигается за счет приоритезации сбора данных в зонах с высокой плотностью объектов или повышенной значимостью для поставленной задачи, что позволяет избежать избыточного сканирования менее важных участков. В результате, общее время, затрачиваемое на построение карты, снижается, а потребление вычислительных ресурсов и энергии оптимизируется, что особенно важно для автономных робототехнических систем с ограниченными ресурсами.
Комбинирование методов Ergodic Exploration, Information-Theoretic Coverage и Distributed Optimal Transport обеспечивает устойчивое и адаптивное покрытие в разнообразных и динамически меняющихся средах. Взаимодействие этих подходов позволяет системе эффективно реагировать на изменения в окружающей обстановке, оптимизируя траекторию исследования и приоритезируя наиболее информативные участки. Использование Ergodic Exploration гарантирует всестороннее исследование, в то время как Information-Theoretic Coverage фокусируется на областях с максимальной неопределенностью, а Distributed Optimal Transport позволяет эффективно распределять ресурсы между различными участками для минимизации затрат и времени на построение точной модели окружения. Такой интегрированный подход повышает надежность и эффективность картографирования в сложных условиях, обеспечивая возможность работы в условиях частичной или полной неопределенности.
Реальное Воздействие и Будущие Направления
Разработанная система D2OC, усиленная алгоритмами искусственного интеллекта, демонстрирует значительное превосходство над традиционными методами картографирования, особенно в условиях неполных данных или прерывистой связи. В отличие от классических подходов, требующих постоянного и надежного потока информации, данная платформа способна эффективно строить и обновлять карты даже при ограниченном доступе к данным. Использование алгоритмов машинного обучения позволяет системе экстраполировать информацию из фрагментарных данных, предсказывать изменения в окружающей среде и корректировать карту в режиме реального времени. Это особенно важно в ситуациях, когда сбор данных затруднен или невозможен, например, при картографировании труднодоступных территорий или мониторинге динамически меняющихся явлений, обеспечивая более точное и надежное представление об окружающей среде.
Исследование продемонстрировало эффективность разработанной системы, получившей название AI-Augmented D2OC, в обнаружении и картировании выбросов метана на полигонах твердых бытовых отходов. Система способна точно определять границы опасных зон, что позволяет разрабатывать и внедрять эффективные стратегии смягчения последствий. Результаты моделирования показали, что предложенный подход демонстрирует значительно более низкое устойчивое состояние расстояния Вассерштейна по сравнению с традиционными децентрализованными методами. Этот показатель подтверждает улучшенную сходимость алгоритма и более высокую точность создаваемых карт, что особенно важно для оперативного реагирования на утечки газа и обеспечения безопасности окружающей среды и населения. Полученные данные указывают на перспективность использования данной технологии для мониторинга и контроля экологически опасных объектов.
В дальнейшем планируется интеграция разработанной системы с данными, получаемыми от датчиков в режиме реального времени. Это позволит значительно повысить оперативность и точность картографирования, особенно в динамически меняющихся условиях окружающей среды. Помимо этого, ведется разработка адаптивных стратегий исследования, основанных на обратной связи от окружающей среды. Система будет способна самостоятельно корректировать траекторию движения и выбирать оптимальные точки для сбора данных, учитывая текущие показания датчиков и особенности ландшафта. Такой подход позволит не только повысить эффективность картографирования, но и снизить энергопотребление и время, затрачиваемое на обследование территории, что особенно важно при мониторинге обширных и труднодоступных участков.
Разработка надежных и эффективных методов картографирования приобретает все большее значение в контексте нарастающих экологических проблем и обеспечения общественной безопасности. Способность точно и оперативно отображать пространственные данные становится критически важной для мониторинга и прогнозирования распространения опасных веществ, таких как метан, выделяемый полигонами захоронения отходов, а также для оценки рисков, связанных с природными катастрофами и промышленными авариями. Улучшенные алгоритмы картографирования позволяют не только более точно определять зоны риска, но и оптимизировать стратегии реагирования на чрезвычайные ситуации, снижая потенциальный ущерб для окружающей среды и здоровья населения. Внедрение инновационных подходов, таких как предложенная AI-усиленная структура D2OC, способствует созданию более устойчивых и адаптивных систем мониторинга, что особенно важно в условиях неполных данных и нестабильной связи.
Исследование демонстрирует, что сложные системы, подобные многоагентным сетям для картографирования окружающей среды, требуют не жесткого планирования, а адаптации к неизбежным сбоям. Авторы предлагают не строить систему, а взращивать её, используя машинное обучение для балансировки между исследованием и эксплуатацией. В этом подходе кроется глубокое понимание природы сложных систем. Как заметил Г.Х. Харди: «Математика — это наука о том, что нельзя доказать». Подобно этому, и в проектировании систем нельзя предвидеть все возможные сценарии, но можно создать механизм, способный адаптироваться к ним, опираясь на принципы оптимального транспорта и метрики Вассерштейна для эффективного восстановления пространственных распределений.
Куда же дальше?
Представленная работа, несомненно, демонстрирует элегантность подхода к децентрализованному построению карт окружения. Однако, каждая новая архитектура обещает свободу от централизованного узкого места, пока не потребует жертвоприношений в виде сложности управления агентами и их взаимодействием. Попытки сбалансировать исследование и эксплуатацию посредством машинного обучения — лишь временный кэш между неизбежными сбоями, когда реальный мир отклоняется от идеализированных предположений.
Истинный вызов лежит не в оптимизации существующих алгоритмов, а в признании того, что порядок — это иллюзия. Системы — это не инструменты, а экосистемы. Следующим шагом видится переход от стремления к глобальной оптимальности к разработке робастных механизмов адаптации к локальным возмущениям и непредсказуемым событиям. Важнее научиться «приручать хаос», чем пытаться его полностью устранить.
Поиск универсальных метрик, подобных метрике Вассерштейна, — это благородная, но, возможно, тщетная задача. Каждое окружение уникально, и попытки навязать ему единую систему координат обречены на провал. Вместо этого, следует сосредоточиться на создании адаптивных систем, способных самостоятельно определять наиболее подходящие метрики и стратегии для конкретной ситуации. И тогда, возможно, мы сможем создать не просто карты, а живые, самоорганизующиеся представления об окружающем мире.
Оригинал статьи: https://arxiv.org/pdf/2601.21126.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- Рубль, ставка ЦБ и геополитика: Что ждет российский рынок в ближайшее время
- Газовый кризис и валютные риски: что ждет российский рынок? (14.03.2026 18:32)
- Российский рынок: Ожидание ставки, стабилизация рубля и рост прибылей компаний (20.03.2026 02:32)
- Будущее WLD: прогноз цен на криптовалюту WLD
- Биткоин в турбулентности: Макрофакторы, волатильность и риски коррекции (20.03.2026 10:45)
- Самые умные хай-йелдовые промежуточные акции, которые стоит купить сейчас за $2,000
- О нет! Стратегический запас биткоинов сталкивается с крахом! 😱 (См. график №4)
- Аэрофлот акции прогноз. Цена AFLT
- Биткоин Кувыркнулся: Что Я Сделаю С Пятью Сотнями?
2026-01-31 16:56