Автор: Денис Аветисян
Новый подход позволяет создавать реалистичные и разнообразные сценарии, необходимые для тестирования и повышения безопасности систем автономного вождения.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал
В статье представлена интеграция условного вариационного автоэнкодера (CVAE) и большой языковой модели (LLM) для генерации редких, но критически важных ситуаций в дорожном движении.
Несмотря на значительный прогресс в области автономного вождения, обеспечение безопасности в редких и сложных дорожных ситуациях остается критической задачей. В статье ‘Learning from Risk: LLM-Guided Generation of Safety-Critical Scenarios with Prior Knowledge’ предложен инновационный подход к генерации реалистичных сценариев, основанный на интеграции условного вариационного автоэнкодера (CVAE) и большой языковой модели (LLM). Данный фреймворк позволяет создавать разнообразные и правдоподобные сценарии, фокусируясь на критических ситуациях и сложных взаимодействиях, что существенно расширяет возможности валидации автономных систем. Сможет ли предложенный подход стать основой для принципиально новых методов стресс-тестирования и повышения надежности беспилотных автомобилей?
Поиск Иголки в Стоге Данных: Проблема Редких Сценариев
Современные системы валидации автономного вождения в значительной степени опираются на реальные наборы данных, такие как NuScenes Dataset и HighD Dataset, однако эти источники испытывают трудности с охватом так называемого «длинного хвоста» — редких, но критически важных событий. Данные, собранные в реальных условиях, по определению ограничены наблюдаемыми ситуациями, что означает, что крайне маловероятные, но потенциально опасные сценарии, такие как неожиданное появление пешехода в ночное время при сильном дожде или нетипичное поведение других транспортных средств, могут быть недостаточно представлены или вовсе отсутствовать. Это создает серьезную проблему для обеспечения надежности и безопасности автономных автомобилей, поскольку системы, обученные на неполных данных, могут оказаться неспособными адекватно реагировать на непредсказуемые ситуации, возникающие в реальном мире. Несмотря на большой объем собранной информации, эти наборы данных не могут гарантировать охват всего спектра возможных опасностей, что подчеркивает необходимость разработки новых методов валидации.
Простое увеличение объема записанных данных для валидации систем автономного вождения сталкивается с серьезными ограничениями. Несмотря на кажущуюся логичность подхода, сбор и обработка огромных массивов информации требуют колоссальных вычислительных ресурсов и временных затрат. Более того, даже при неограниченных ресурсах, статистическая вероятность встретить редкие, но критические сценарии в реальных дорожных условиях остается крайне низкой. Таким образом, увеличение объема данных не гарантирует охват всего спектра потенциальных опасностей, оставляя системы уязвимыми перед непредсказуемыми ситуациями и подчеркивая необходимость разработки более эффективных методов валидации, способных целенаправленно выявлять и устранять слабые места.
Существующие методы верификации автономных транспортных средств сталкиваются с серьезной проблемой: неспособностью целенаправленно создавать сложные сценарии, выявляющие слабые места системы. Вместо активного поиска уязвимостей, существующие подходы полагаются на анализ уже существующих данных или случайные вариации, что не гарантирует всестороннего тестирования. Это приводит к тому, что критические ситуации, способные вызвать сбой в работе системы, остаются незамеченными до момента реального столкновения с ними на дороге. Подобный подход препятствует созданию действительно надежных и безопасных автономных систем, поскольку недостаточная способность к проактивному выявлению и устранению уязвимостей существенно снижает уровень доверия к ним и замедляет их широкое внедрение.

Генеративные Основы: CVAE и Графовые Нейронные Сети
В основе генератора сценариев используется условный вариационный автоэнкодер (CVAE), предназначенный для создания базовых сценариев дорожного движения на основе изученных распределений данных. CVAE обучается на наборах данных, содержащих информацию о траекториях транспортных средств, сигналах светофоров и других релевантных параметрах. В процессе обучения модель строит вероятностное представление входных данных, позволяющее ей генерировать новые, реалистичные сценарии, сохраняющие статистические характеристики исходных данных. Условность CVAE обеспечивается за счет использования дополнительных входных параметров, позволяющих управлять процессом генерации и создавать сценарии с заданными свойствами, такими как плотность трафика или тип дорожной обстановки.
Для более точного моделирования сложных взаимодействий между участниками дорожного движения и учета контекстуальной информации, условный вариационный автоэнкодер (CVAE) интегрирован с графовой нейронной сетью (GNN). GNN обрабатывает данные об агентах и их окружении, представляя их в виде графа, где узлы — это агенты, а ребра — их взаимосвязи. Эта графовая структура позволяет CVAE учитывать не только индивидуальные траектории, но и пространственные отношения между агентами, динамику их взаимодействия и особенности окружающей среды, что приводит к созданию более реалистичных и правдоподобных сценариев движения. Таким образом, GNN служит для кодирования реляционных данных, которые затем используются CVAE для генерации сценариев.
Комбинация условного вариационного автоэнкодера (CVAE) и графовой нейронной сети (GNN) демонстрирует высокую точность реконструкции сценариев дорожного движения. На двух широко используемых наборах данных — highD и nuScenes — средняя ошибка реконструкции составляет менее $0.5 \, м^2$. Этот показатель указывает на способность модели достоверно воспроизводить исходные сценарии, что критически важно для валидации и тестирования систем автономного вождения.

Интеллектуальное Усиление Риска с Помощью LLM
Для расширения возможностей вариационного автоэнкодера (VAE) в генерации сценариев, была осуществлена интеграция с большой языковой моделью (LLM). LLM используется для анализа семантики сцен, выявления потенциальных рисков и динамической адаптации функций потерь в процессе генерации сценариев. Это позволяет VAE не просто генерировать разнообразные сценарии, но и фокусироваться на тех, которые содержат критические ситуации, что повышает реалистичность и полезность сгенерированных данных для обучения систем автономного вождения. Адаптация функций потерь, основанная на анализе LLM, позволяет более эффективно обучать модель генерации сценариев, направляя её на создание более сложных и реалистичных ситуаций.
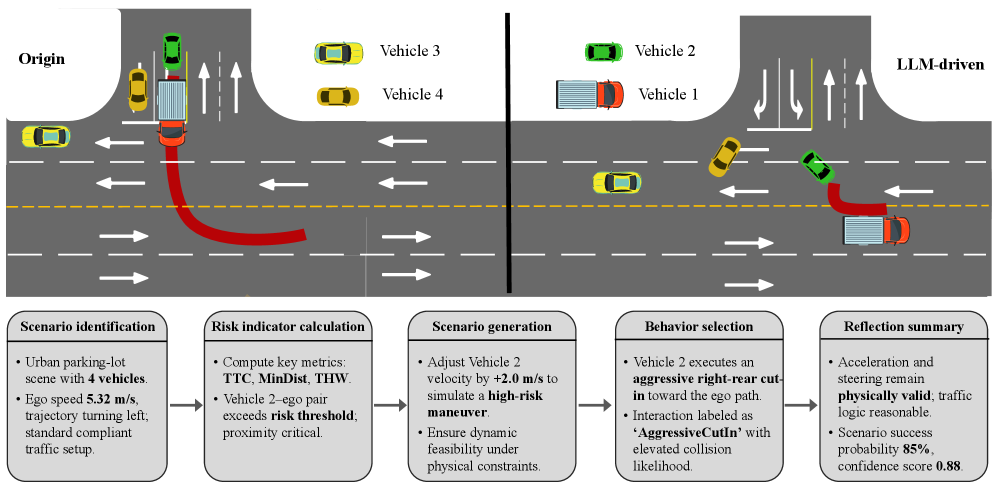
Для идентификации и усиления потенциально опасных ситуаций, большая языковая модель (LLM) использует физически обоснованную модель риска, основанную на вычислении индикаторов риска. Ключевыми показателями, формирующими основу этой модели, являются время до столкновения (TTC — Time-To-Collision), время до выхода за пределы полосы (THW — Time-Headway to Warning), и время до пересечения линии полосы (TLC — Time-Lane-Crossing). Вычисление этих показателей позволяет LLM оценивать критичность ситуации и динамически адаптировать процесс генерации сценариев, акцентируя внимание на наиболее опасных моментах и повышая вероятность возникновения агрессивных сценариев, таких как резкое перестроение.
В результате применения предложенного подхода удалось достичь покрытия в 22.8% для редких (long-tail) событий в дорожном движении, что превышает базовый показатель в 17%. При этом вероятность успешной генерации сценариев агрессивного перестроения (cut-in) составляет 85%. Данные показатели демонстрируют улучшение способности системы идентифицировать и воспроизводить сложные, маловероятные, но потенциально опасные ситуации на дороге, что критически важно для разработки и тестирования систем автономного вождения.

Надежная Валидация в Разнообразных Симуляционных Средах
Разработанный конвейер генерации состязательных сценариев функционирует без проблем в высокоточных симуляторах, таких как CARLA Simulator и SMARTS Simulator. Эта интеграция позволяет проводить масштабное тестирование и валидацию систем автономного вождения в контролируемой и воспроизводимой среде, что критически важно для повышения уверенности в их безопасности и надежности. Благодаря возможности работы непосредственно в этих симуляторах, система обеспечивает реалистичное моделирование сложных дорожных ситуаций и позволяет всесторонне оценить реакцию автономного транспортного средства на различные факторы, включая непредсказуемое поведение других участников дорожного движения и сложные погодные условия. Такой подход значительно превосходит традиционные методы тестирования, основанные на ограниченном наборе предопределенных сценариев.
Возможность проведения масштабного тестирования и валидации систем автономного вождения в контролируемой и воспроизводимой среде имеет решающее значение для обеспечения их безопасности и надежности. Благодаря использованию симуляторов, таких как CARLA и SMARTS, разработчики получают возможность подвергать алгоритмы управления сложным и разнообразным сценариям, которые было бы сложно или опасно воспроизвести в реальных условиях. Это позволяет выявлять потенциальные уязвимости и недочеты в работе системы на ранних стадиях разработки, значительно снижая риски, связанные с эксплуатацией автономных транспортных средств. Повторяемость тестов гарантирует, что улучшения и изменения в алгоритмах можно объективно оценить и подтвердить, обеспечивая последовательное повышение уровня безопасности и надежности системы.
Сгенерированные сценарии, относящиеся к категории “длинного хвоста” — редких, но потенциально опасных ситуаций — демонстрируют высокий уровень достоверности, подтвержденный оценкой в 0.88. Более того, анализ распределений ускорений, выполненный с использованием метрики Kullback-Leibler Divergence (KL Divergence), показывает значения в диапазоне от 1.08 до 2.75. Данные показатели свидетельствуют о высокой степени соответствия между распределениями ускорений в сгенерированных сценариях и реальными условиями вождения, что подтверждает способность системы создавать правдоподобные и реалистичные ситуации для всестороннего тестирования автономных транспортных средств. Такая высокая точность позволяет надежно оценивать поведение систем автопилотирования в сложных и непредсказуемых условиях.
Исследование демонстрирует попытку автоматизировать генерацию критических сценариев для автономного вождения, используя большие языковые модели и вариационные автоэнкодеры. Звучит неплохо, пока не задумаешься, что все эти сложные конструкции — лишь попытка воссоздать логику, которую опытный водитель оценивает за доли секунды. Как говорил Роберт Таржан: «Простота — это высшая степень совершенства». И тут же вспоминается, что документация к этим самым моделям, вероятно, уже устарела, а «реальный мир» внесёт свои коррективы, заставив всё переписывать. Очевидно, что проблема недостатка редких событий для валидации систем безопасности никуда не денется, просто сейчас это назовут «AI-driven scenario generation» и получат инвестиции.
Куда Поведёт Автопилот?
Представленная работа, безусловно, добавляет ещё один уровень сложности в и без того непростую задачу валидации автономных систем. Генерация редких, но критически важных сценариев — проблема, которая, казалось, будет решаться за счёт увеличения вычислительных мощностей и объёма данных. Однако, интеграция больших языковых моделей намекает на то, что простого перебора вариантов недостаточно. Вероятно, следующая волна исследований будет сосредоточена не столько на создании более «умных» генераторов, сколько на верификации сгенерированных сценариев. Ведь красиво сгенерированный сценарий — это лишь половина дела; вот чтобы он действительно покрывал все возможные грани риска — это уже сложнее.
Не стоит забывать и о неизбежном “разрыве” между симуляцией и реальностью. Авторы справедливо указывают на эту проблему, но её решение, как показывает опыт, всегда требует больше времени и ресурсов, чем планировалось изначально. Вполне вероятно, что следующая итерация подобных систем будет включать в себя более сложные модели поведения участников дорожного движения, учитывающие не только физические параметры, но и вероятностные характеристики человеческого фактора. Хотя, если честно, это мы уже пытались делать в 2018-м, только называлось это “когнитивным моделированием”.
В конечном счёте, данное направление исследований — это лишь один из шагов на пути к созданию безопасных автономных систем. И каждый новый шаг, как показывает история, неизменно порождает новые вопросы и новые вызовы. Вполне возможно, что через несколько лет все эти красивые схемы и алгоритмы окажутся лишь очередным уровнем технического долга, который придётся расплачивать новыми итерациями разработки.
Оригинал статьи: https://arxiv.org/pdf/2511.20726.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- ЕвроТранс акции прогноз. Цена EUTR
- Серебро прогноз
- Российский рынок: Нефть, дивиденды и геополитика. Что ждет инвесторов? (23.03.2026 18:32)
- Ормузский тупик и DeFi-волатильность: анализ рисков и возможностей для инвесторов (11.04.2026 09:15)
- Palantir: К удивлению в 2026-м?
- АЛРОСА акции прогноз. Цена ALRS
- Мечел акции прогноз. Цена MTLR
- Газпром акции прогноз. Цена GAZP
- Как два ETF играют в одни ворота, но с разными мячами
2025-11-28 09:17