Автор: Денис Аветисян
Новый метод позволяет эффективно настраивать модели движения автомобилей, повышая точность симуляций и безопасность дорожного движения.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал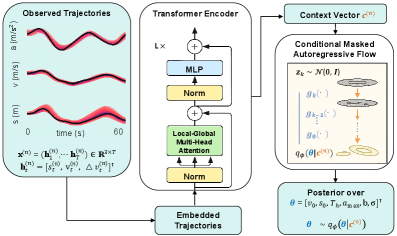
Предлагается масштабируемый фреймворк активного обучения для калибровки моделей следования, объединяющий амортизированный вывод и активное проектирование симуляций для эффективной оценки неопределенности.
Несмотря на необходимость учета вариативности поведения водителей в микроскопическом моделировании транспортных потоков, большинство существующих калибровок моделей следования ограничиваются определением единственного набора параметров. В данной работе, посвященной ‘Active Simulation-Based Inference for Scalable Car-Following Model Calibration’, предложен новый масштабируемый подход, сочетающий байесовскую калибровку с активным выбором симуляций и амортизированным выводом. Это позволяет эффективно оценивать неопределенность параметров моделей следования и повышать достоверность симуляций транспортных потоков. Какие перспективы открываются для применения предложенного фреймворка в задачах анализа рисков и оптимизации транспортных систем?
Вызов точности: Моделирование поведения водителя
Традиционные модели управления автомобилем, такие как Интеллектуальная модель водителя (IDM), зачастую оказываются неспособными адекватно воспроизвести сложность реального поведения на дороге. Это приводит к неточностям в симуляциях и прогнозах трафика, поскольку упрощенные алгоритмы не учитывают множество факторов, влияющих на решения водителя. Например, IDM, фокусируясь на поддержании безопасного расстояния и скорости, игнорирует индивидуальные особенности водителей, такие как агрессивность, осторожность или отвлекаемость, а также влияние внешних условий — погоды, дорожного покрытия, времени суток. В результате, моделируемое поведение существенно отличается от реального, что снижает достоверность симуляций и ограничивает их применение в задачах планирования трафика, разработки систем помощи водителю и тестирования автономных транспортных средств. Повышение точности прогнозов требует разработки более сложных моделей, способных учитывать эти не учтенные факторы и более реалистично имитировать поведение человека за рулем.
Несоответствия в моделях управления транспортными средствами возникают из-за не учтенных факторов, которые приводят к отклонениям от идеализированного поведения. Эти отклонения могут быть как устойчивыми, проявляясь в индивидуальных особенностях стиля вождения каждого человека, так и стохастическими, обусловленными непредсказуемыми изменениями в окружающей среде или состоянии водителя. Для повышения точности симуляций и прогнозов необходимо совершенствование существующих моделей путем интеграции этих немоделируемых факторов, что требует разработки новых методов учета вариативности и нелинейности поведения человека за рулем. В частности, необходимо учитывать влияние когнитивных процессов, эмоционального состояния и адаптации к изменяющимся условиям дорожного движения для создания более реалистичных и надежных моделей.
ASBC: Масштабируемая калибровка поведения
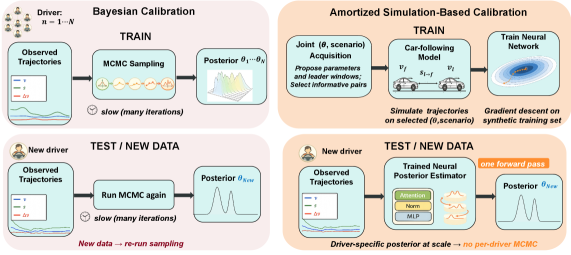
Активная калибровка на основе моделирования (ASBC) представляет собой новый подход к калибровке моделей поведения водителей, объединяющий эффективность апостериорного вывода с амортизацией и целенаправленное исследование, обеспечиваемое активным дизайном моделирования. В отличие от традиционных методов, требующих большого объема данных и ручной настройки, ASBC использует апостериорный вывод с амортизацией для быстрого обучения распределению параметров модели для каждого водителя. Это позволяет системе адаптироваться к новым траекториям движения без повторного выполнения дорогостоящих процедур оптимизации. Целенаправленное исследование, осуществляемое активным дизайном моделирования, позволяет системе эффективно выбирать наиболее информативные сценарии для моделирования, что снижает потребность в большом объеме данных и ускоряет процесс калибровки. Такой подход позволяет достичь высокой точности и масштабируемости в калибровке моделей поведения водителей для различных приложений, таких как разработка и тестирование систем автономного вождения.
В основе ASBC лежит Residual-Augmented IDM (модель индивидуального поведения водителя), представляющая собой расширение базовой модели дополнительными членами, предназначенными для явного моделирования как случайных (стохастических), так и систематических (устойчивых) отклонений от идеального поведения. Эти дополнения позволяют учитывать индивидуальные особенности каждого водителя, выходящие за рамки стандартных параметров модели, и более точно отражать реальные траектории движения. В частности, стохастические члены моделируют непредсказуемые вариации в поведении, такие как случайные реакции на внешние раздражители, а устойчивые члены — индивидуальные предпочтения и стиль вождения, проявляющиеся в долгосрочной перспективе. Использование таких дополнений повышает точность калибровки модели и улучшает её способность к прогнозированию поведения водителя.
В основе ASBC лежит использование амортизированного апостериорного вывода, позволяющего построить распределение параметров модели для каждого водителя. Вместо непосредственной оценки параметров для каждой новой траектории, ASBC обучается отображать входные данные (траектории) в параметры распределения, описывающего вероятное состояние модели водителя. Это позволяет значительно ускорить адаптацию к новым данным, поскольку вычисление апостериорного распределения сводится к быстрому проходу через обученную нейронную сеть, а не к сложным процедурам оптимизации. Таким образом, система способна эффективно обобщать информацию о поведении водителя на основе ограниченного количества данных и быстро адаптироваться к изменениям в его стиле вождения.
![На графиках представлены распределения ошибок симуляции ASBC на протяжении 10 секунд в каждом временном окне для набора данных HighD, показывающие зависимость среднеквадратичной ошибки [latex]RMSE[/latex] и стандартного отклонения [latex]ES[/latex] от расстояния между транспортными средствами, скорости и ускорения, с использованием гауссовских и мате́рновских ядер.](https://arxiv.org/html/2602.05246v1/x3.png)
Инференционный движок: Изучение поведения водителя
В основе инференционного движка ASBC лежит Transformer Encoder, используемый для эффективного кодирования данных траектории движения в контекстный вектор. Этот вектор служит входными данными для последующего вывода (posterior inference), позволяя системе оценивать вероятностное распределение параметров поведения водителя. Использование Transformer Encoder обеспечивает эффективную обработку последовательных данных траектории и выделение наиболее значимых признаков, необходимых для точного моделирования поведения. Полученный контекстный вектор компактно представляет историю движения и текущее состояние, что позволяет системе принимать обоснованные решения и прогнозировать дальнейшие действия водителя.
Оценка неопределенности достигается за счет использования метода Monte Carlo Dropout, который заключается в случайном отключении нейронов в слоях сети во время процесса инференса. Множественные проходы через сеть с различными конфигурациями отключенных нейронов позволяют получить распределение предсказаний, дисперсия которого служит мерой неопределенности модели. Этот подход обеспечивает надежную оценку уверенности модели в своих предсказаниях и способствует более эффективному исследованию пространства параметров во время калибровки, позволяя выявлять и корректировать систематические ошибки.
Для оценки точности полученного апостериорного распределения в системе используется расхождение Кульбака-Лейблера (KL Divergence). Данная метрика количественно определяет разницу между апостериорным распределением, полученным системой, и истинным распределением параметров, которое, как правило, неизвестно. Минимизация KL Divergence позволяет обеспечить надежное приближение истинного распределения, что критически важно для корректной калибровки и принятия решений в условиях неопределенности. D_{KL}(p||q) = \in t p(x) \log \frac{p(x)}{q(x)} dx — формула, используемая для вычисления расхождения, где p — истинное распределение, а q — приближенное апостериорное распределение.
Оптимизация калибровки с помощью активного моделирования
Стратегия активного моделирования позволяет эффективно использовать ограниченные вычислительные ресурсы за счет целенаправленного отбора наиболее информативных комбинаций параметров и сценариев для проведения симуляций. Вместо случайного или равномерного перебора, система фокусируется на тех областях параметрического пространства, где получение новых данных наиболее сильно снижает неопределенность в оценке выходных параметров модели. Такой подход позволяет добиться максимального прироста информации при минимальных затратах, существенно повышая точность и надежность калибровки моделей, особенно в задачах, где проведение большого количества симуляций является дорогостоящим или невозможным.
В основе процесса оптимизации калибровки лежит так называемый Совместный Показатель Приобретения (Joint Acquisition Score), выступающий в качестве ключевого критерия отбора наиболее информативных пар параметров и сценариев для моделирования. Этот показатель не просто оценивает потенциальную полезность конкретного сценария, но и непосредственно направлен на снижение неопределенности в полученном апостериорном распределении. По сути, он позволяет выявить те сценарии, которые максимально эффективно уменьшают разброс в предсказаниях модели, тем самым повышая точность и надежность калибровки. Приоритет отдается тем параметрам и ситуациям, которые, согласно расчетам, способны наиболее существенно повлиять на уточнение модели и уменьшение погрешностей в прогнозировании ключевых показателей, таких как расстояние, скорость и ускорение.
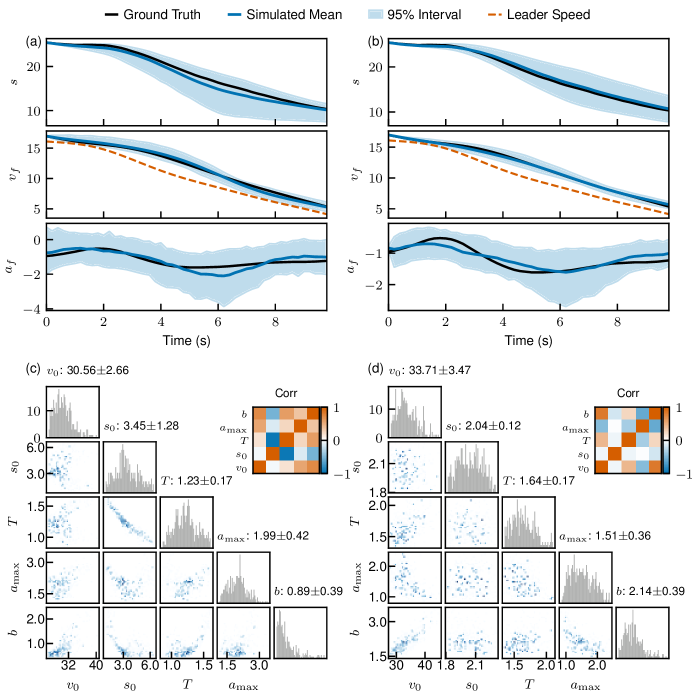
Исследования, проведенные на масштабном наборе данных HighD, продемонстрировали значительное повышение точности и обобщающей способности модели благодаря применению метода ASBC по сравнению с традиционными подходами к калибровке. В частности, использование модели Matérn для остатков позволило добиться снижения показателя Energy Score (ES) в диапазоне от 26.5% до 41%. Такое существенное уменьшение ES свидетельствует о более адекватной оценке неопределенности и, следовательно, о более надежных предсказаниях модели в различных сценариях. Полученные результаты подтверждают эффективность ASBC в улучшении качества калибровки и повышении доверия к прогнозам модели в задачах, связанных с обработкой данных высокой размерности.
В ходе исследований было установлено, что применение метода ASBC позволяет существенно повысить точность прогнозирования ключевых параметров поведения транспортных средств. В частности, наблюдается снижение среднеквадратичной ошибки (RMSE) до 20% при оценке таких важных метрик, как интервал между автомобилями, их скорость и ускорение. Данное улучшение свидетельствует о более адекватном моделировании динамики движения и, как следствие, о повышении надежности систем помощи водителю и автономного управления, где точное предсказание этих параметров играет критическую роль для обеспечения безопасности и эффективности.
![Исследования на наборе данных HighD показывают, что использование как полной модели, так и только параметров [latex]\boldsymbol{\theta}[/latex] или soft-shrinkage позволяет достичь лучших результатов, чем использование только одного из этих компонентов.](https://arxiv.org/html/2602.05246v1/x6.png)
Представленная работа демонстрирует стремление к рациональному построению моделей поведения транспортных потоков. Авторы предлагают не просто калибровку, а активный процесс обучения, в котором симуляции используются для целенаправленного уменьшения неопределенности. Это напоминает философский взгляд Дэвида Юма: «Сомнение есть часть здравого смысла». Действительно, подход, основанный на последовательном уточнении модели путем активного выбора наиболее информативных симуляций, позволяет избежать самоуспокоения и приблизиться к более адекватной репрезентации реальности. Оптимизация, в данном контексте, не является абсолютной, а зависит от поставленных целей и имеющихся данных — компромисс между знанием и удобством, если угодно.
Что дальше?
Представленная работа, безусловно, демонстрирует потенциал активного обучения в контексте калибровки моделей управления транспортным потоком. Однако, стоит помнить: данные симуляции — это не отражение реальности, а лишь её удобная аппроксимация. Вопрос о переносе калибровочных коэффициентов, полученных на одном наборе сценариев, на принципиально иные условия остаётся открытым. Нельзя забывать о систематических ошибках, заложенных в самой структуре моделей «следуй за машиной», и о тех аспектах поведения водителей, которые попросту не учитываются.
Перспективы дальнейших исследований, вероятно, лежат в области комбинирования симуляционных данных с данными, полученными из реальных дорожных ситуаций. Построение гибридных моделей, способных учитывать как теоретические предположения, так и эмпирические наблюдения, представляется задачей нетривиальной, но необходимой. Важно также разработать более надёжные методы оценки неопределённости, учитывающие не только статистическую дисперсию, но и систематические смещения, неизбежно возникающие при упрощении сложных систем.
И, наконец, следует признать: стремление к «идеальной» калибровке — это, возможно, утопия. Задача состоит не в том, чтобы полностью воспроизвести реальность, а в том, чтобы создать модель, достаточно точную для решения конкретной практической задачи. Данные — это инструмент, а не истина в последней инстанции.
Оригинал статьи: https://arxiv.org/pdf/2602.05246.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- Nvidia: О дроблениях акций и призраках биржи
- Российский рынок: Ожидание ставки, стабилизация рубля и рост прибылей компаний (20.03.2026 02:32)
- Аэрофлот акции прогноз. Цена AFLT
- Рынок в ожидании ставки: падение прибыли гигантов и переток инвесторов (20.03.2026 11:32)
- Стоит ли покупать доллары за бразильские реалы сейчас или подождать?
- Рубль, ставка ЦБ и геополитика: Что ждет российский рынок в ближайшее время
- Российский рынок: между геополитикой, инфляцией и корпоративной прибылью (23.03.2026 11:33)
- Рынок в ожидании: ставка ЦБ, риски для маркетплейсов и убытки регулятора (21.03.2026 01:32)
- Искусственный Разум и Судьбы: Взгляд Инвестора
2026-02-08 03:15