Автор: Денис Аветисян
Представлена инновационная методика оптимизации траекторий движения роботов-манипуляторов, обеспечивающая высокую точность и устойчивость в реальных условиях.
"Покупай на слухах, продавай на новостях". А потом сиди с акциями никому не известной биотех-компании. Здесь мы про скучный, но рабочий фундаментал.
Бесплатный Телеграм канал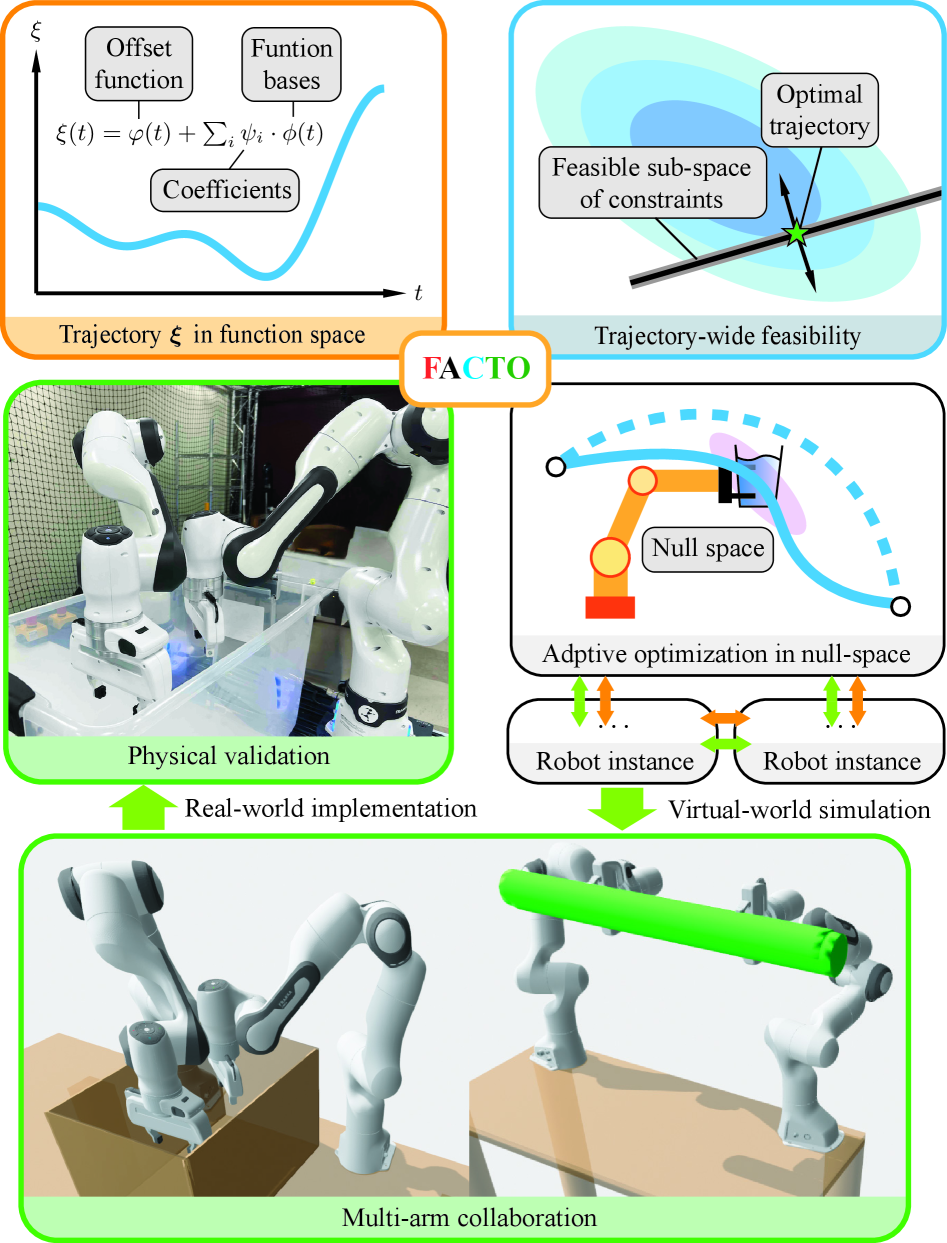
FACTO: адаптивная оптимизация траекторий в функциональном пространстве с учетом ограничений и обеспечением непрерывной выполнимости.
Обеспечение надежного и эффективного планирования движений для роботов-манипуляторов в сложных, ограниченных пространствах остается сложной задачей. В данной работе представлена новая методика — ‘FACTO: Function-space Adaptive Constrained Trajectory Optimization for Robotic Manipulators’ — использующая адаптивную оптимизацию траекторий в функциональном пространстве и оптимизацию в нулевом пространстве ограничений для обеспечения непрерывной выполнимости движения. Предложенный подход демонстрирует улучшенное качество и надежность решения по сравнению с существующими методами, включая как оптимизационные, так и основанные на выборке планировщики. Сможет ли данная стратегия стать основой для разработки более автономных и гибких роботизированных систем, способных эффективно функционировать в реальных условиях?
Сложность Оптимизации Траекторий: Вызов для Современных Алгоритмов
Традиционные методы оптимизации траекторий, как правило, испытывают затруднения при решении задач высокой размерности и с многочисленными ограничениями. Это обусловлено экспоненциальным ростом вычислительной сложности с увеличением числа переменных и условий, что приводит к существенным задержкам в вычислениях и, как следствие, к получению лишь субоптимальных решений. По мере усложнения задачи, требующей одновременного учета множества факторов, таких как кинематические ограничения робота, избежание препятствий и минимизация времени выполнения, алгоритмы сталкиваются с трудностями в поиске глобального оптимума. O(n!) — пример роста вычислительных затрат, где n представляет собой количество степеней свободы системы, что подчеркивает проблему масштабируемости этих методов для сложных, реальных сценариев. В результате, поиск эффективных и надежных алгоритмов оптимизации траекторий остается актуальной задачей в робототехнике и автоматизации.
Методы планирования на основе выборки, такие как RRT-Connect и PRM, демонстрируют значительную гибкость при решении задач поиска траектории в сложных пространствах, однако их эффективность зачастую снижается при стремлении к оптимальным решениям. Эти алгоритмы, формируя траекторию путем случайной выборки конфигураций и последующего соединения их, могут потребовать значительного количества итераций для достижения приемлемой точности, особенно в пространствах высокой размерности или при наличии жестких ограничений. Несмотря на способность находить решения даже в сложных условиях, отсутствие гарантированной точности и тенденция к генерации неоптимальных или избыточных траекторий ограничивают их применимость в задачах, требующих высокой производительности и прецизионного управления, например, в робототехнике или автоматизированном проектировании.
Существующие методы оптимизации траекторий, такие как CHOMP, GPMP2 и TrajOpt, несмотря на свою эффективность в ряде задач, сталкиваются с существенными ограничениями при работе со сложными ограничениями. Эти алгоритмы часто требуют тщательной настройки параметров для достижения приемлемого результата, а процедура этой настройки может быть трудоемкой и зависеть от конкретной задачи. Ограничения могут проявляться в виде трудностей при обработке нелинейных ограничений, ограничений на скорость и ускорение, а также при обеспечении безопасности траектории в условиях высокой размерности пространства состояний. В результате, поиск оптимальной траектории может потребовать значительных вычислительных ресурсов и времени, а полученное решение может быть субоптимальным или даже неприменимым на практике. Необходимость в более надежных и автоматизированных методах, способных эффективно справляться со сложными ограничениями, остается актуальной задачей в области робототехники и планирования движений.
![Оптимизация траектории осуществляется путем решения линеаризованной системы ограничений [latex]A_{\mathrm{ct}}\Delta\psi=b_{\mathrm{ct}}[/latex], включающей как требования к задаче и граничные условия, так и ограничения, активируемые при приближении к границам допустимой области, что обеспечивает соблюдение ограничений и снижение стоимости целевой функции [latex]\nabla\mathcal{F}[/latex].](https://arxiv.org/html/2602.20225v1/x4.png)
FACTO: Функциональный Подход к Оптимизации Траекторий
В основе FACTO лежит новый подход к оптимизации траекторий, представляющий траектории в виде коэффициентов в определенном функциональном пространстве. Вместо непосредственной оптимизации точек траектории, FACTO оперирует с набором коэффициентов, определяющих значения базовых функций, формирующих траекторию. Это позволяет переформулировать задачу оптимизации траектории как задачу оптимизации этих коэффициентов, что существенно упрощает вычисления и позволяет эффективно решать задачи высокой размерности. Выбор конкретного функционального пространства и базисных функций определяет форму и возможности представляемых траекторий. Представление траектории в виде коэффициентов позволяет использовать инструменты функционального анализа для анализа и модификации траекторий.
В FACTO, параметризация траекторий осуществляется посредством использования ортогональных базисных функций, что позволяет существенно снизить размерность решаемой задачи оптимизации. Вместо непосредственной оптимизации по дискретным точкам траектории, оптимизируются коэффициенты разложения в выбранном базисе. Это приводит к уменьшению количества оптимизируемых переменных и, как следствие, к повышению вычислительной эффективности алгоритма. Использование ортогонального базиса, такого как sin(nt) или полиномы Чебышева, гарантирует линейную независимость базисных функций, что упрощает процесс оптимизации и позволяет избежать избыточности параметров. Уменьшение размерности особенно важно для задач с высокой степенью свободы или требующих решения в реальном времени.
В рамках подхода FACTO, обеспечение выполнимости ограничений и устойчивости оптимизации траектории осуществляется посредством проецирования в нулевое пространство (null space projection). Данный метод позволяет напрямую включать ограничения в процесс оптимизации, не вводя дополнительных штрафных функций или множителей Лагранжа. Суть заключается в том, что векторы, представляющие ограничения, ортогональны векторам, определяющим допустимое пространство решений. Проецируя градиент целевой функции на нулевое пространство, оптимизация исключает любые компоненты, нарушающие ограничения, гарантируя, что полученная траектория всегда удовлетворяет заданным условиям. Это обеспечивает более эффективное и надежное решение задачи оптимизации траектории, особенно в сложных сценариях с множеством ограничений.
Адаптивные Техники для Повышения Эффективности
Алгоритм FACTO использует адаптивные области доверия для динамической настройки пространства поиска, что позволяет ускорить сходимость и повысить качество получаемых решений. В отличие от фиксированных областей, адаптивные области доверия автоматически изменяют свой размер и форму в зависимости от поведения оптимизационного процесса. Это достигается путем оценки градиента целевой функции и гессиана в каждой итерации, что позволяет точно определить оптимальный размер области, в которой можно безопасно выполнять поиск. Уменьшение области доверия при приближении к локальному оптимуму и увеличение в областях с высокой неопределенностью позволяет алгоритму эффективно исследовать пространство состояний и избегать застревания в локальных минимумах, обеспечивая более быструю сходимость к глобальному оптимуму и улучшая качество решения.
В алгоритме FACTO, применение экспоненциального скользящего усреднения (EMA Smoothing) позволяет существенно улучшить процесс оптимизации путем снижения колебаний и повышения стабильности. EMA-сглаживание эффективно фильтрует шум и случайные отклонения в процессе поиска решения, усредняя предыдущие значения параметров траектории с экспоненциально уменьшающимся весом. Это приводит к более плавной и предсказуемой траектории, что особенно важно для сложных задач манипулирования, и позволяет алгоритму быстрее сходиться к оптимальному решению, избегая застревания в локальных минимумах. Применение EMA-сглаживания является ключевым фактором, обеспечивающим высокую скорость и надежность FACTO в задачах планирования траекторий.
Метод FACTO демонстрирует высокую эффективность в задачах управления одиночной рукой без ограничений, достигая уровня успешности от 94% до 100%. Данный показатель превосходит результаты, полученные при использовании алгоритма RRT-Connect и других оптимизационных планировщиков. В ходе тестирования, FACTO последовательно обеспечивал более высокий процент успешного выполнения задач по сравнению с альтернативными подходами, подтверждая его превосходство в данной категории задач.
В задачах манипулирования с ограничениями, алгоритм FACTO демонстрирует существенно более высокую вероятность успешного выполнения (87.5%) по сравнению с другими протестированными алгоритмами. Среднее время вычисления составляет от 0.03 до 0.3 секунд, что значительно быстрее, чем у методов, основанных на случайной выборке (sampling-based planners). Данный показатель эффективности позволяет применять FACTO в задачах, требующих оперативного планирования траектории манипулятора в сложных средах с препятствиями.
Показатель шероховатости траектории, генерируемой алгоритмом, находится в диапазоне от 15 до 42. Этот параметр, характеризующий плавность движения, указывает на способность алгоритма создавать более естественные и менее прерывистые траектории. Низкое значение шероховатости свидетельствует о минимальном количестве резких изменений в скорости и направлении движения, что особенно важно для задач, требующих высокой точности и плавности, таких как манипулирование роботами и управление сложными механизмами.
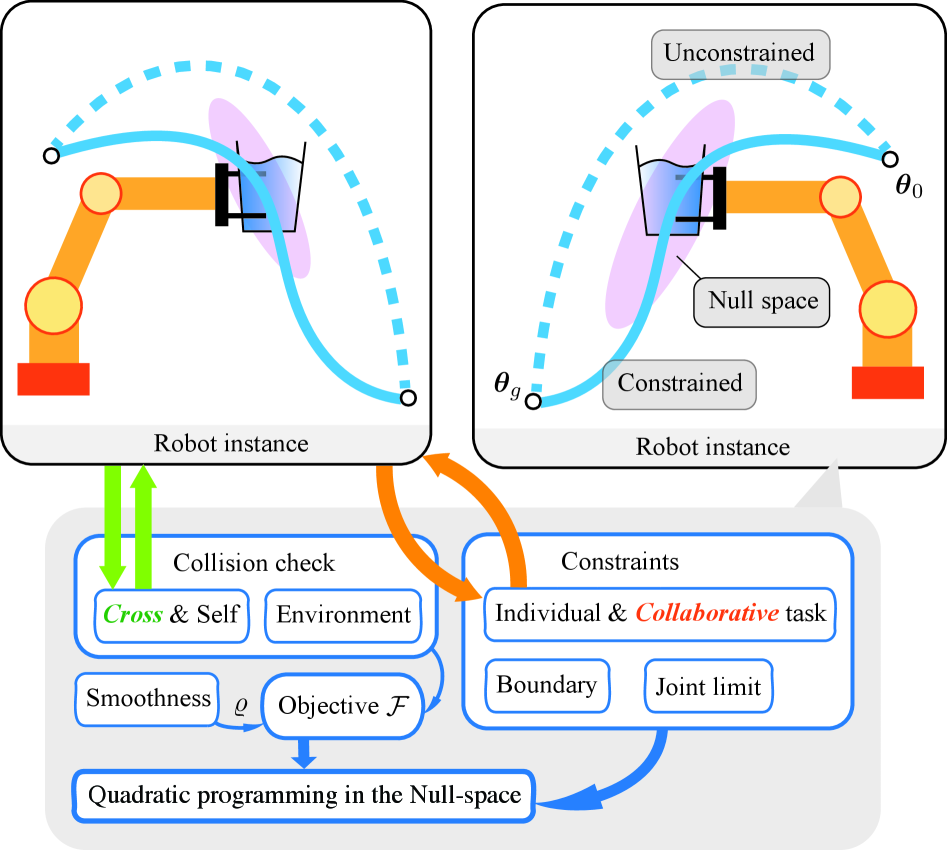
![Двуручная система планирования движений отображает конфигурации робота [latex]q_L[/latex] и [latex]q_R[/latex] в положения конечных эффекторов [latex]T_L(q_L)[/latex] и [latex]T_R(q_R)[/latex], после чего проверяет валидность предлагаемых захватов [latex]T_{g_L}[/latex] и [latex]T_{g_R}[/latex] на предмет столкновений с самим роботом и окружающей средой.](https://arxiv.org/html/2602.20225v1/x6.png)
Влияние и Перспективы Развития в Робототехнике
Представление пространства функций, реализованное в FACTO, оказалось особенно эффективным при координации движений двух роботизированных манипуляторов. Этот подход позволяет системе планировать и выполнять сложные, синхронизированные действия, что значительно превосходит возможности традиционных методов. Вместо управления каждым суставом независимо, FACTO оперирует с функциями, описывающими желаемое поведение манипуляторов, обеспечивая более плавные и точные траектории. Такая функциональная репрезентация не только упрощает процесс планирования, но и повышает устойчивость системы к внешним возмущениям, что критически важно для выполнения сложных задач, требующих высокой координации и точности, например, сборки или совместной работы с человеком.
В ходе испытаний, алгоритм FACTO продемонстрировал впечатляющую эффективность в задачах манипулирования двумя роботизированными руками, достигнув показателя успешного выполнения в 87,5%. Этот результат существенно превосходит аналогичные показатели, полученные при использовании других протестированных алгоритмов. Достигнутое превосходство указывает на способность FACTO более эффективно планировать и координировать сложные движения, обеспечивая повышенную надежность и точность выполнения операций, что делает его перспективным решением для широкого спектра прикладных задач, требующих высокой степени координации и манипулятивных возможностей.
Разработка FACTO позволила преодолеть ограничения, присущие традиционным методам управления роботами, что открывает перспективы для создания более эффективных и надежных роботизированных систем в различных областях. Предыдущие подходы часто испытывали трудности с координацией сложных движений и адаптацией к изменяющимся условиям, что снижало производительность и ограничивало сферу применения. FACTO, благодаря своему инновационному подходу к представлению пространства функций, демонстрирует повышенную устойчивость и точность в выполнении задач, расширяя возможности автоматизации в промышленности, логистике, здравоохранении и других секторах. Это позволяет создавать роботов, способных выполнять более сложные и разнообразные операции с большей надежностью и меньшими затратами, тем самым способствуя дальнейшему развитию и внедрению роботизированных технологий в повседневную жизнь.
Дальнейшие исследования FACTO направлены на расширение его возможностей для работы в динамически меняющихся условиях окружающей среды. Планируется внедрение алгоритмов, позволяющих роботу адаптироваться к непредвиденным препятствиям и изменениям в задании в реальном времени. Особое внимание уделяется интеграции методов машинного обучения, что позволит системе не только выполнять запрограммированные действия, но и совершенствовать свою работу на основе полученного опыта. Это позволит создавать более гибкие и надежные роботизированные системы, способные самостоятельно обучаться и адаптироваться к новым задачам, значительно расширяя спектр их применения в различных областях, от производства до медицины и освоения космоса.

Представленная работа демонстрирует стремление к элегантности в решении сложной задачи планирования траекторий для роботов-манипуляторов. Подход FACTO, использующий функциональное представление и оптимизацию в нулевом пространстве, подчеркивает важность структуры в определении поведения системы. Как однажды заметил Брайан Керниган: «Простота — это не минимализм, а чёткое различение необходимого и случайного». Эта фраза находит отражение в разработанном фреймворке, где акцент сделан на эффективное и надёжное планирование непрерывно изменяющихся траекторий, избегая излишней сложности и фокусируясь на ключевых аспектах обеспечения безопасности и достижении поставленной цели. Фреймворк FACTO стремится к созданию системы, где каждый элемент выполняет свою функцию, внося вклад в общую производительность и надёжность.
Что дальше?
Представленная работа, безусловно, продвигает область планирования траекторий роботов, однако, как часто бывает, решение одной задачи неизбежно выявляет новые. Элегантность предложенного подхода — в использовании функционального пространства и оптимизации в нулевом пространстве — обнажает фундаментальную проблему: как эффективно масштабировать эти методы для систем с высокой степенью свободы и сложными ограничениями? Если система кажется сложной, она, вероятно, хрупка, и будущее исследований лежит в поиске принципиально новых представлений, позволяющих упростить задачу без потери ее выразительности.
Особенно остро стоит вопрос о робастности. Достигнутая в симуляции и реальных экспериментах производительность — это лишь первый шаг. Реальный мир полон непредсказуемости, и алгоритмы, не способные адаптироваться к неожиданным возмущениям, обречены на провал. Архитектура — это искусство выбора того, чем пожертвовать, и будущие работы должны сосредоточиться на определении оптимального баланса между точностью, скоростью и надежностью.
Наконец, стоит задуматься о расширении области применения. Возможности, продемонстрированные в контексте манипуляторов, могут быть перенесены и на другие типы роботов, но потребуют значительной адаптации. Поиск универсальных принципов, лежащих в основе эффективного планирования движения, остается главной задачей, и ее решение, вероятно, потребует выхода за рамки традиционных подходов к оптимизации.
Оригинал статьи: https://arxiv.org/pdf/2602.20225.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Стоит ли покупать фунты за йены сейчас или подождать?
- ЕвроТранс акции прогноз. Цена EUTR
- Фракталы на бирже: Новый взгляд на оптимизацию портфеля
- Серебро прогноз
- РУСАЛ акции прогноз. Цена RUAL
- Крипто в зоне турбулентности: Геополитика, хаки и перспективы роста XRP (13.04.2026 09:15)
- Город как игра: как улучшить жизнь в районах
- Стоит ли покупать доллары за шекели сейчас или подождать?
- Прогноз нефти
- Делимобиль акции прогноз. Цена DELI
2026-02-25 22:56