Интеллектуальное картографирование: как роботы учатся исследовать мир вместе
Новый подход к децентрализованному управлению позволяет группам роботов эффективно строить карты сложных пространств, используя возможности машинного обучения.
Новый подход к децентрализованному управлению позволяет группам роботов эффективно строить карты сложных пространств, используя возможности машинного обучения.
Новый подход позволяет эффективно решать задачи выбора и ранжирования, интегрируя их в современные модели искусственного интеллекта.
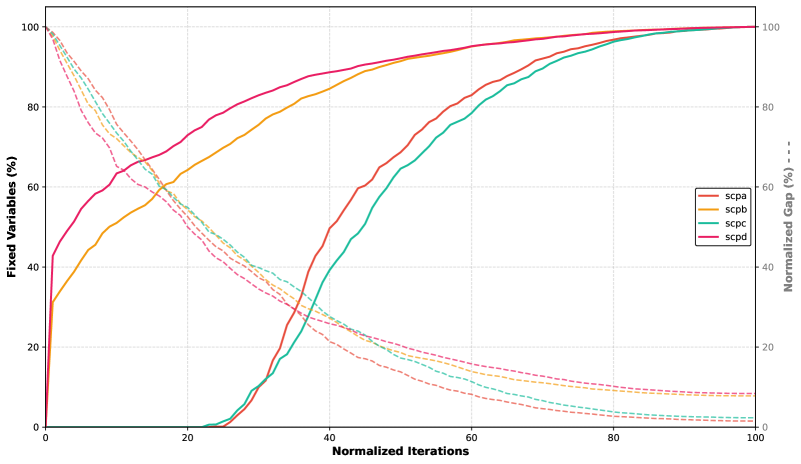
В статье представлена инновационная стратегия ‘dual-path fixing’, позволяющая существенно повысить эффективность алгоритмов поиска оптимальных решений в задачах целочисленного линейного программирования.
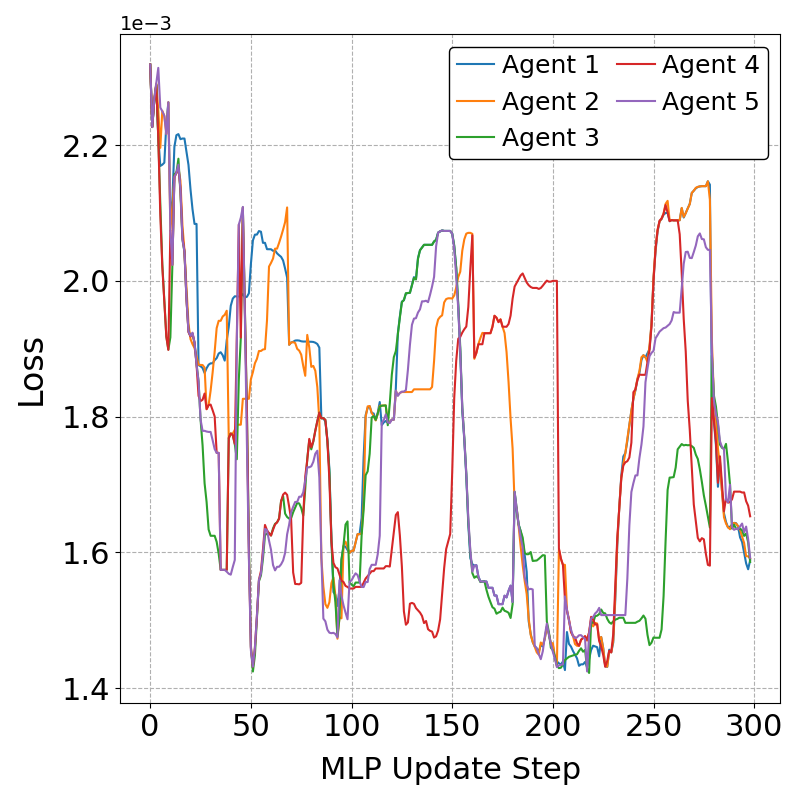
Новое исследование раскрывает динамику стохастического градиентного спуска в многомерных моделях, показывая, что обучение происходит как серия случайных скачков.
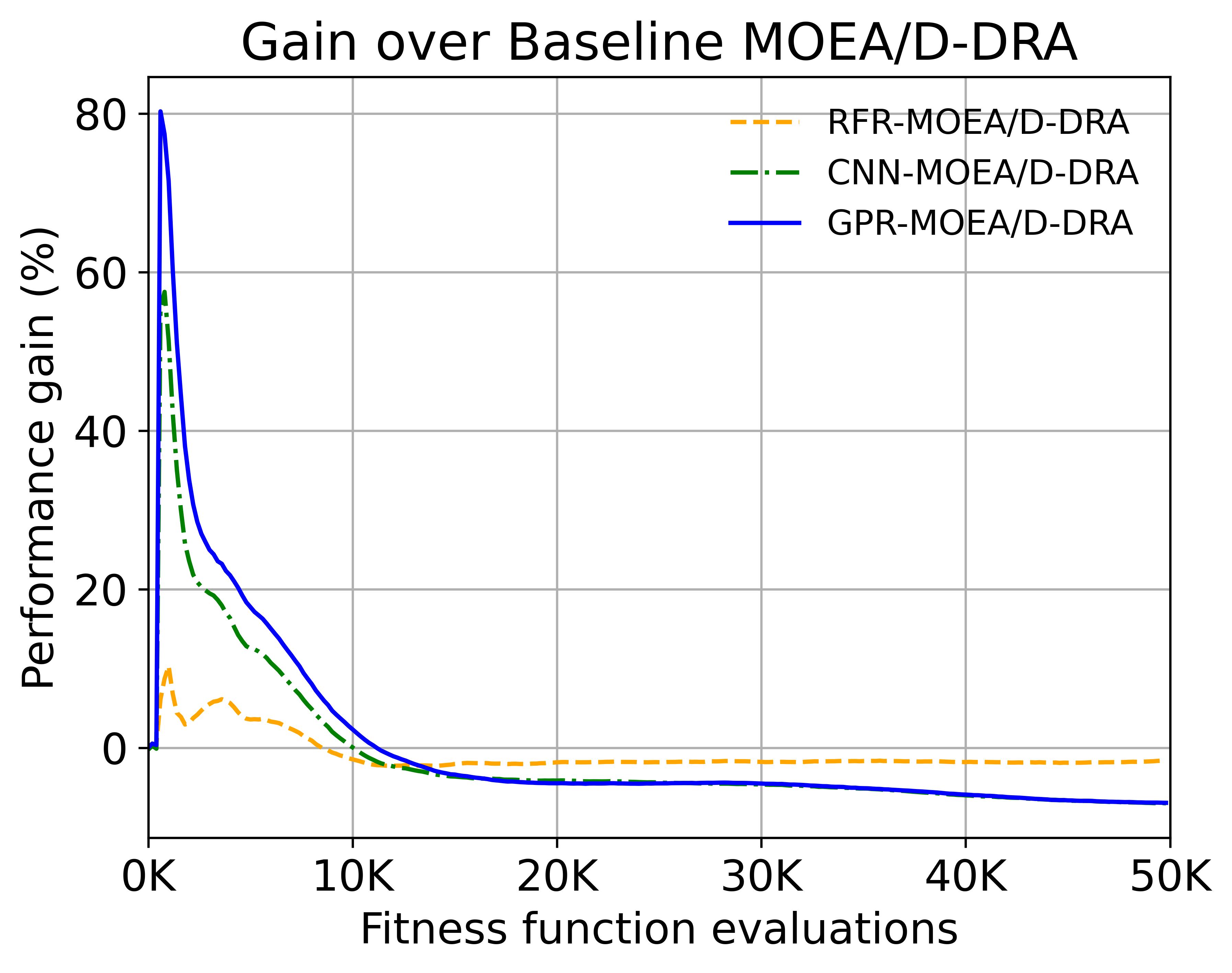
Новая стратегия, основанная на адаптивном моделировании, значительно повышает скорость сходимости при решении сложных многоцелевых задач оптимизации.