Глобальная Борьба Моделей: Стратегии и Итоги
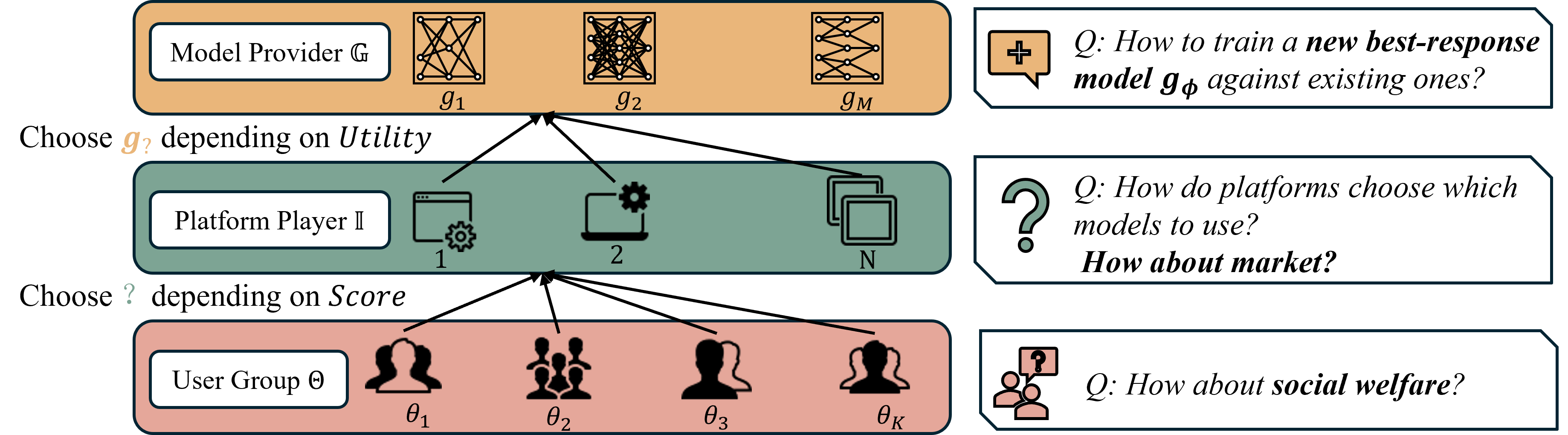
Новое исследование анализирует конкуренцию между различными подходами к созданию генеративных моделей и их влияние на общие результаты.
Новое исследование анализирует конкуренцию между различными подходами к созданию генеративных моделей и их влияние на общие результаты.
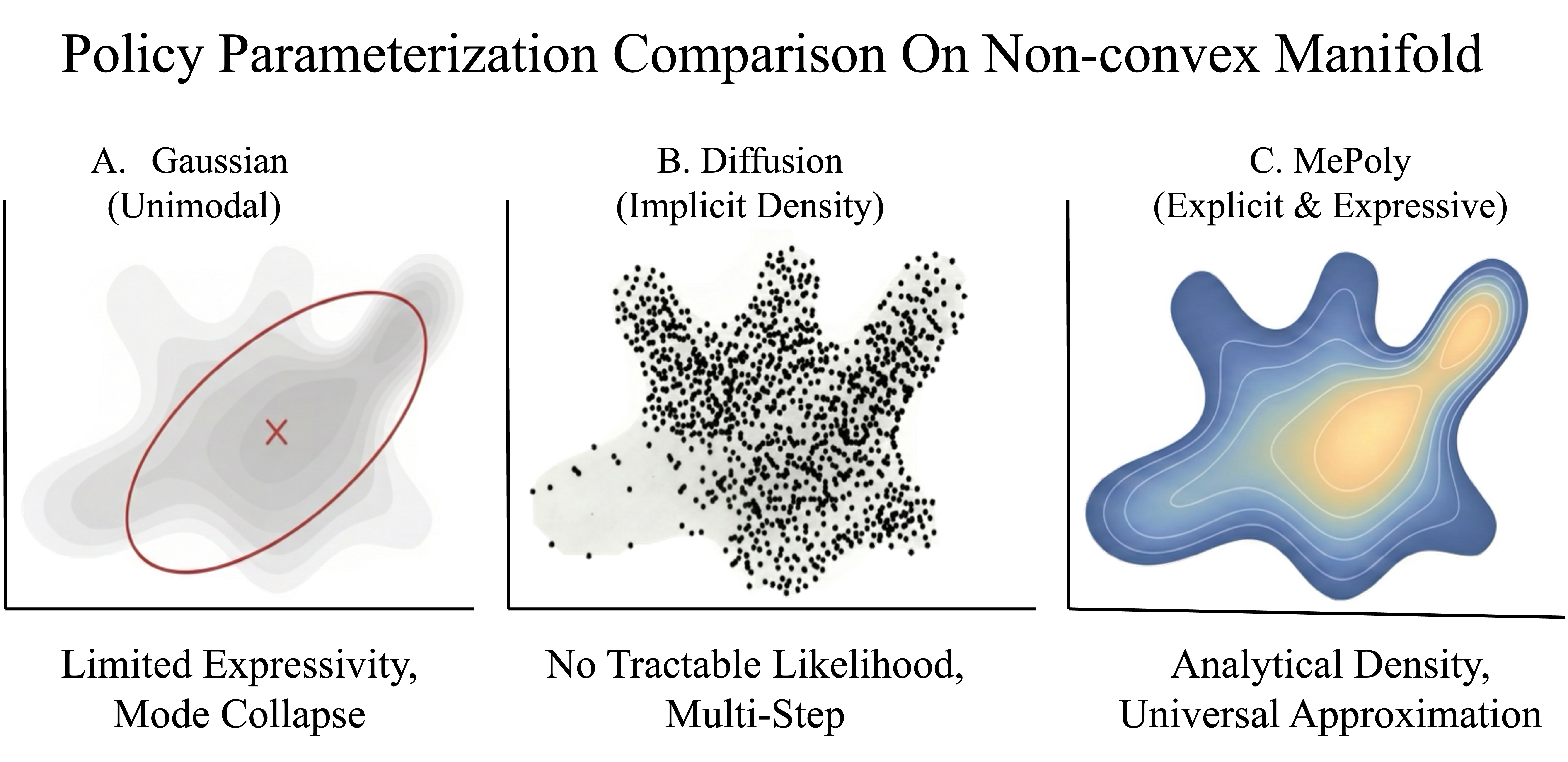
![В исследовании проблемы восстановления фазы, при [latex]a=0.01[/latex], [latex]q=0.0[/latex] и [latex]\alpha=6.5[/latex], предсказанное аннелированным методом Каца-Райса распределение гессиана для типичных энергетических минимумов демонстрирует положительную сложность [latex]{\widetilde{\Sigma}}\_{0}(q)\sim eq 7.10^{-3}>0[/latex], а также указывает на положение отрицательной аномалии “BBP” в спектре, характерной для минимумов с положительной сложностью, что подтверждается результатами численного моделирования с использованием метода градиентного спуска.](https://arxiv.org/html/2602.17779v1/x1.png)
Новое исследование раскрывает топологические особенности высокоразмерных пространств функций потерь, что позволяет предсказывать поведение алгоритмов оптимизации.
Исследователи предлагают MePoly — инновационную параметризацию политик, основанную на полиномиальных распределениях, для повышения эффективности обучения с подкреплением и имитационного обучения.
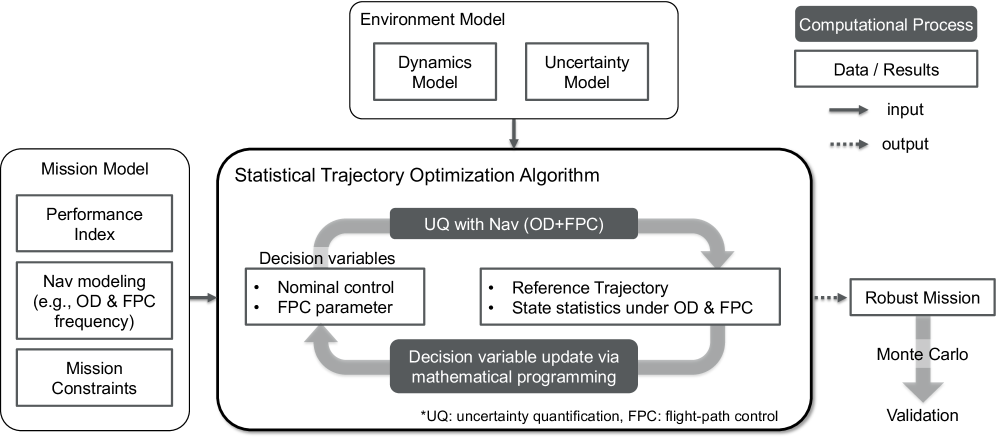
Новый подход позволяет разрабатывать надежные траектории для космических аппаратов, учитывая различные источники неопределенности и ограничения по риску.
В статье представлена методика построения портфельных стратегий, учитывающих изменения предпочтений инвестора во времени и нестабильные ставки дисконтирования.